

A Real-time Terrain Estimation Method Based on Kernel Function
A kernel function and terrain technology, applied in the field of unmanned vehicle environment perception, can solve the problems of not being able to update online, difficult to adapt to complex terrain estimation, and large processing capacity, and achieve the effect of improving blind spots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044]The specific implementation manner of the present invention will be illustrated below with reference to the accompanying drawings.
[0045] The present invention develops a real-time terrain estimation method based on a kernel function. The hardware implementation platform based on the method is an unmanned vehicle platform, which is equipped with sensors such as 64-line 3D laser radar and INS-GPS integrated navigation unit. .
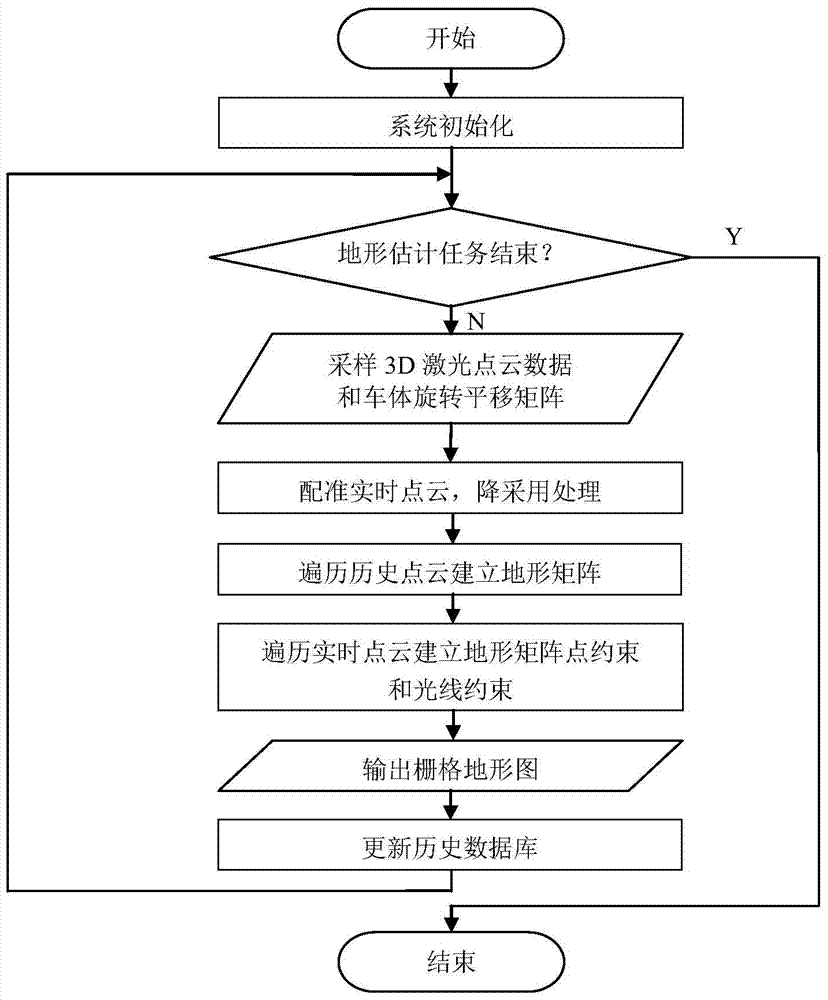
[0046] Based on the above platform, the typical workflow first needs to perform system initialization, including: vehicle bottom layer initialization, sensor parameter initialization, vehicle attitude position initialization, terrain matrix establishment, variable scale kernel function template establishment; then determine whether the terrain estimation task is over, if it ends directly This method, otherwise, enters into a cyclic system workflow, and each processing cycle needs to include the following steps, such as figure 1 Shown:
[0047] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More