

Variation particle swarm optimized BP neural network proportion integration differentiation (PID) control algorithm
A BP neural network and mutation particle swarm technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of large regional error, slow convergence speed, and unsatisfactory control effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
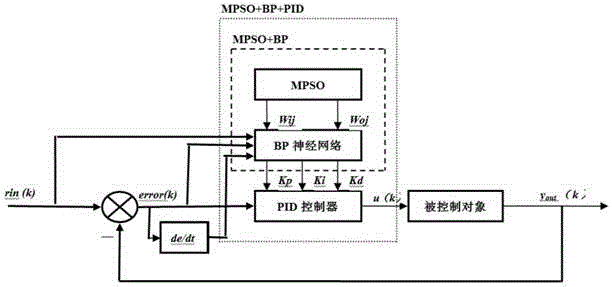
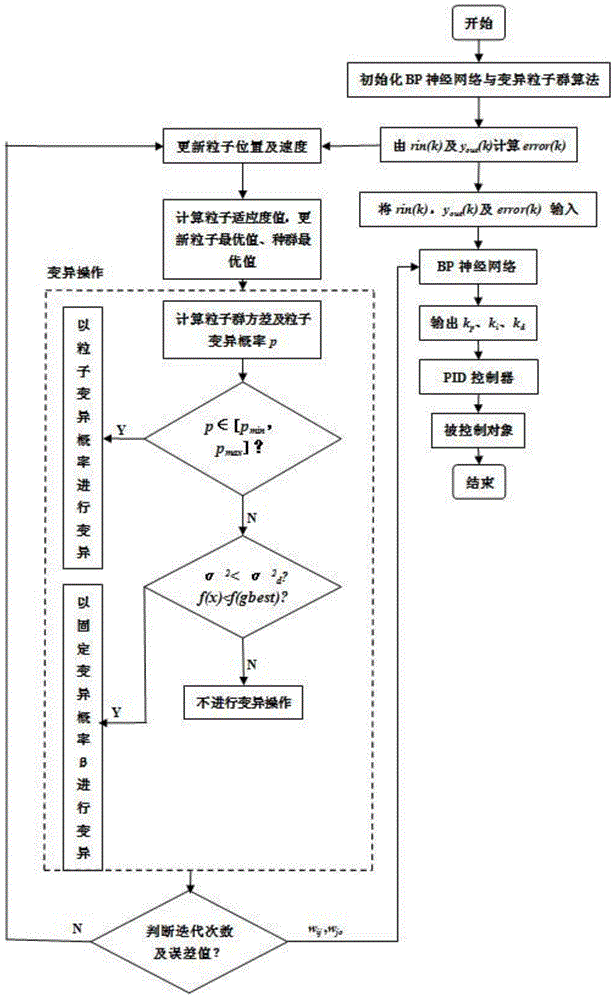
[0041] like Figure 1-3 A BP neural network PID control algorithm of variation particle swarm optimization shown includes the following steps:
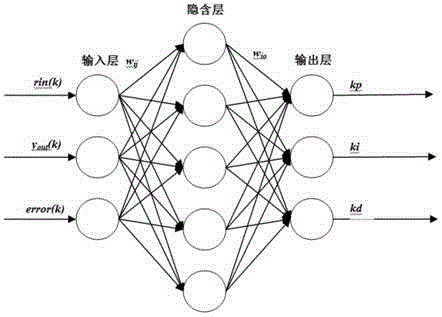
[0042] Step 1. Initialize the BP neural network: initialize the BP neural network, determine the number N of nodes in the input layer of the BP neural network and the number S of nodes in the hidden layer, and give the initial value w of the hidden layer weighting coefficient ij and the initial value of the output layer weighting coefficient w jo ; The number of nodes in the input layer of the BP neural network corresponds to the selected operating state of the controlled system, the integral function of the output layer neurons is a non-negative Sigmoid function, and the activation function of the hidden layer neurons is a positive and negative symmetric Sigmoid function .
[0043] Step 2. Initialize the variation particle swarm optimization algorithm: initialize the variation particle swarm optimization algorithm, determine the pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More