

Control method of robot automatic spraying system
An automatic spraying and control method technology, applied in the direction of spraying devices, can solve the problems of inaccurate positioning of fixtures, affecting the quality of spraying, and long time consumption, and achieve the effect of solving scanning problems and realizing real-time tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] In order to make the purpose, technical solutions and beneficial effects of the present invention more clear, the preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, and the present invention will be further described to facilitate the understanding of technical personnel.
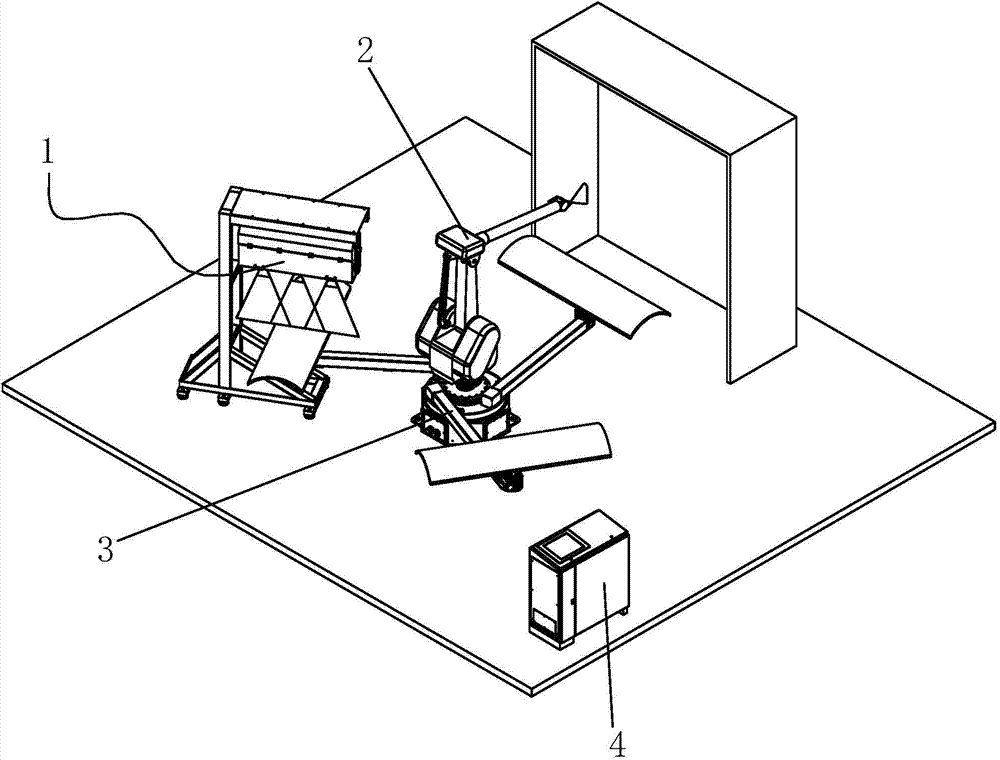
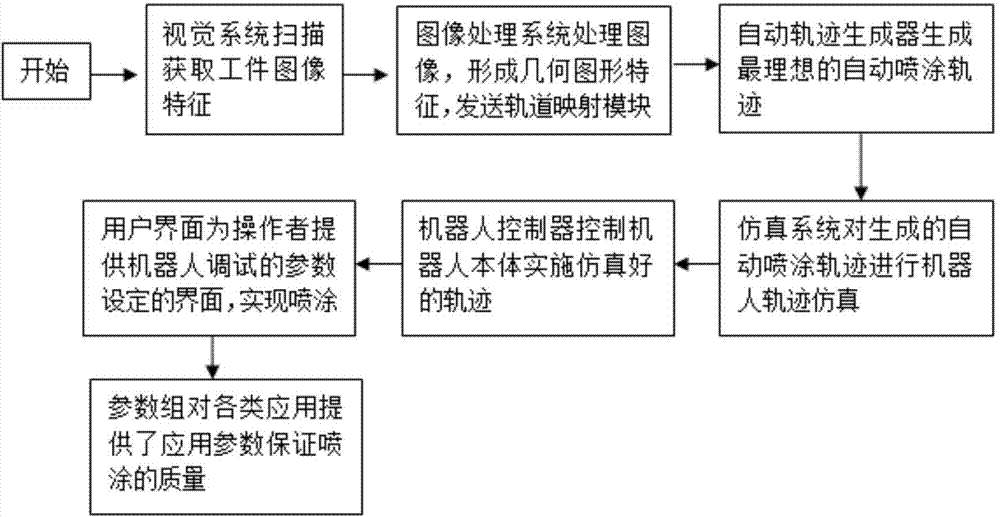
[0053] Such as figure 1 and figure 2 Shown, a kind of control method of robot automatic spraying system comprises the following steps:
[0054] (1) Acquiring the feature data of the workpiece to be sprayed: use the vision system 1 to scan the fixed or mobile workpiece to be sprayed, and obtain the data of the workpiece to be sprayed to obtain the appearance characteristics of the sprayed object. The data can be displayed in real time and transmitted to the integrated computer 4 for processing, The integrated computer 4 is integrated with an image processing system for processing scanning data and generating an optimal path...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More