

Road boundary detection method based on three-dimensional laser radar
A three-dimensional laser and boundary detection technology, applied in the field of intelligent vehicle environment perception, can solve the problems that cannot be applied to rural roads, etc., and achieve the effect of small impact, low time complexity and good robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] Below in conjunction with embodiment the present invention is described in further detail:
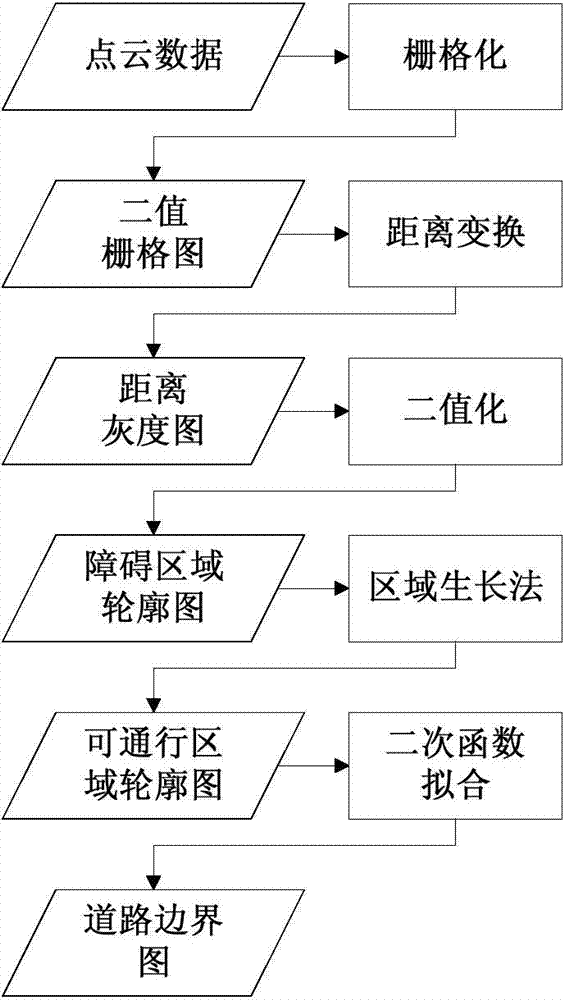
[0041] The road boundary detection method based on three-dimensional laser radar, specifically:
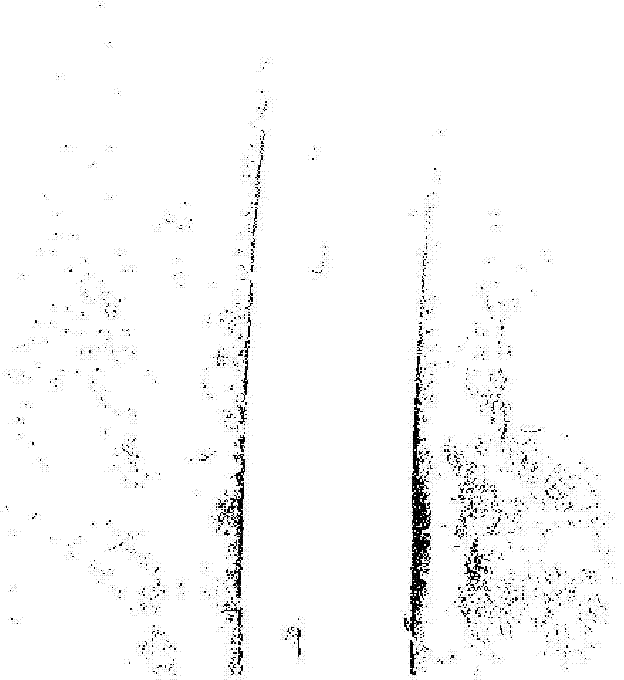
[0042] Step 1, projecting the point cloud data collected by the 3D lidar to generate a binary raster image;
[0043] Step 1.1, transform the data obtained by the 3D lidar into the car body coordinate system, and the 3D data point P in the radar coordinate system v and the point P in the body coordinate system c The conversion relationship is P c =P v R+t, where R and t are external parameters obtained after calibration.
[0044] Step 1.2, divide the point cloud data into a series of small squares with a side length of 0.2m within the rectangular range of 82.4 meters in front of the origin of the car body coordinate system, 20 meters in the back, and 51.2 meters in the left and right, and a square is a grid Grid, get 512*512 grids, where the origin of the car body coordinate sys...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More