

Passive mechanical artificial limb mechanism controlled by electromagnet
A technology for electromagnets and prosthetics, which is applied in the fields of prosthesis, medical science, artificial arms, etc., can solve the problems of low practicability, cumbersome power supply, and cumbersome mechanism, and achieve the effect of convenient use, good experience, and cost reduction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
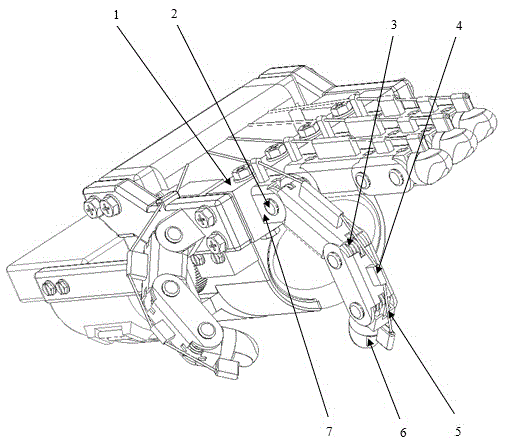
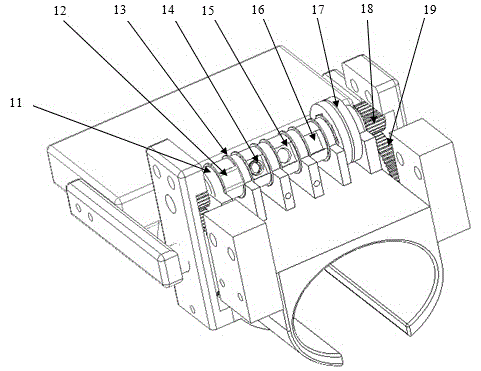
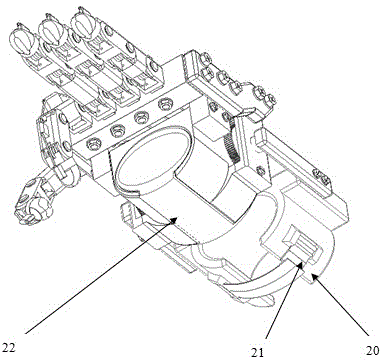
[0014] Such as Figure 1 to Figure 4 As shown, the passive mechanical prosthesis mechanism controlled by the electromagnet of the present invention includes the following three parts:
[0015] One, power mechanism
[0016] The power mechanism is mainly composed of a palm cover 1, a wrist cover 20, a sticky button 21, an inner bushing 22 and a large gear 19. The wrist cover is firmly fixed on the wrist through the sticky button, and the palm cover is fixed on the back of the palm through the inner bushing. . When the wrist rotates, the palm and the wrist rotate. At this time, the palm cover on the palm rotates with the palm relative to the wrist, thereby driving the large gear fixed with the palm cover to rotate, so that the force on the wrist Just pass on the big gear by the relative motion between the palm and the wrist. At this time, the rotation of the large gear drives the meshed small gear to rotate, thereby transmitting the force on the wrist to the front end of the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More