

Machine system including wireless sensor
一种机械系统、传感器的技术,应用在机械手、程序控制机械手、机器人等方向,能够解决不考虑延迟、很难抑制机械臂前端部振动、信号传送延迟等问题
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 approach
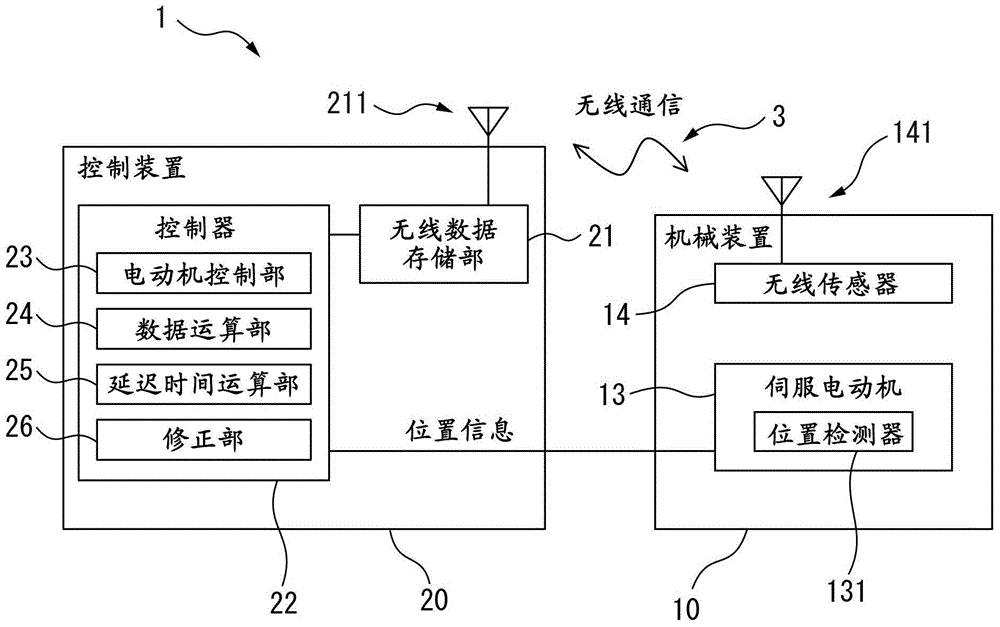
[0020] Below, refer to Figure 1 ~ Figure 6B , the first embodiment of the present invention will be described. figure 1 It is a figure which schematically shows the structure of the mechanical system 1 which concerns on 1st Embodiment of this invention. Such as figure 1 As shown, the mechanical system 1 has: a mechanical device 10 and a control device 20 for controlling the mechanical device 10 . In addition, the mechanical device 10 is constituted by a machine tool, an industrial robot, or the like, but an industrial robot is used as the mechanical device 10 in the following description.
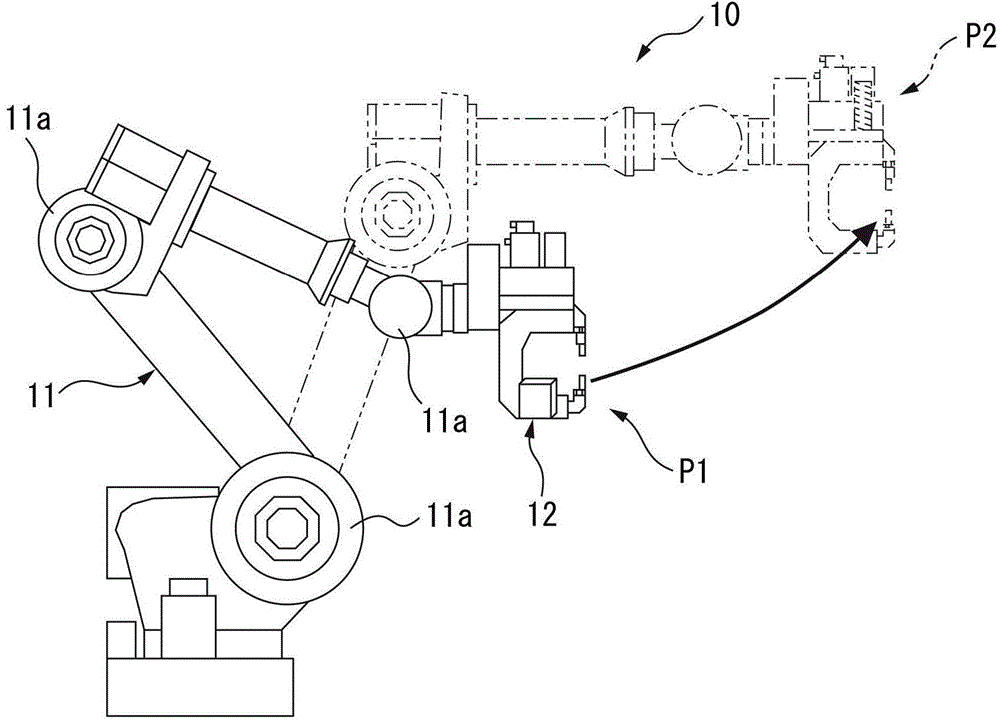
[0021] figure 2 It is a figure which shows the structure of the articulated industrial robot 10 which concerns on embodiment of this invention. Such as figure 2 As shown, the industrial robot 10 has a rotatable mechanical arm 11 , and a tool 12 (a spot welding gun in the figure) is mounted on the front end of the mechanical arm 11 . The robot arm 11 is rotationally driven by a serv...
no. 2 approach
[0050] refer to Figure 7 ~ Figure 9 A second embodiment of the present invention will be described. The difference between the second embodiment and the first embodiment lies in the processing of the delay time calculation unit 25 . That is, in the first embodiment, the delay time ta is calculated by shifting the first time-series data successively by a predetermined time Δt, but in the second embodiment, by separately determining the first time-series data and the second time-series data The delay time ta is calculated from the operation start time of the series data. In addition, below, it demonstrates mainly about the difference from 1st Embodiment.
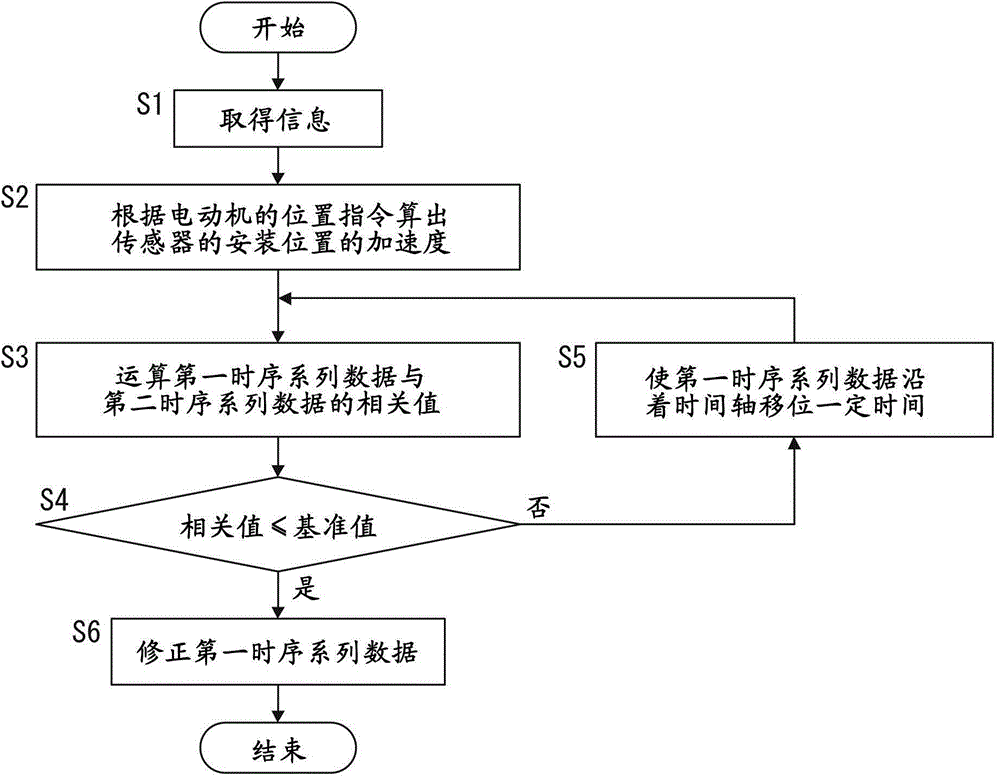
[0051] Figure 7 It is a flowchart showing an example of processing executed by the controller 22 of the mechanical system 1 according to the second embodiment of the present invention. In step S21, with image 3 Similarly to step S1, the first time-series data of the acceleration a1 stored in the wireless data storage uni...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More