

Adaptive tracking control method of multi-mobile-robot system under condition of attitude unknown
A mobile robot and adaptive tracking technology, applied in the field of intelligent robots, can solve problems such as chattering and inapplicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be described in detail below with reference to the accompanying drawings and examples.
[0042] The invention proposes an observer-based self-adaptive control method aiming at the tracking control problem of the multi-mobile robot system under the condition of unknown posture, so that the follower in the multi-mobile robot system can realize the tracking control of the leader.
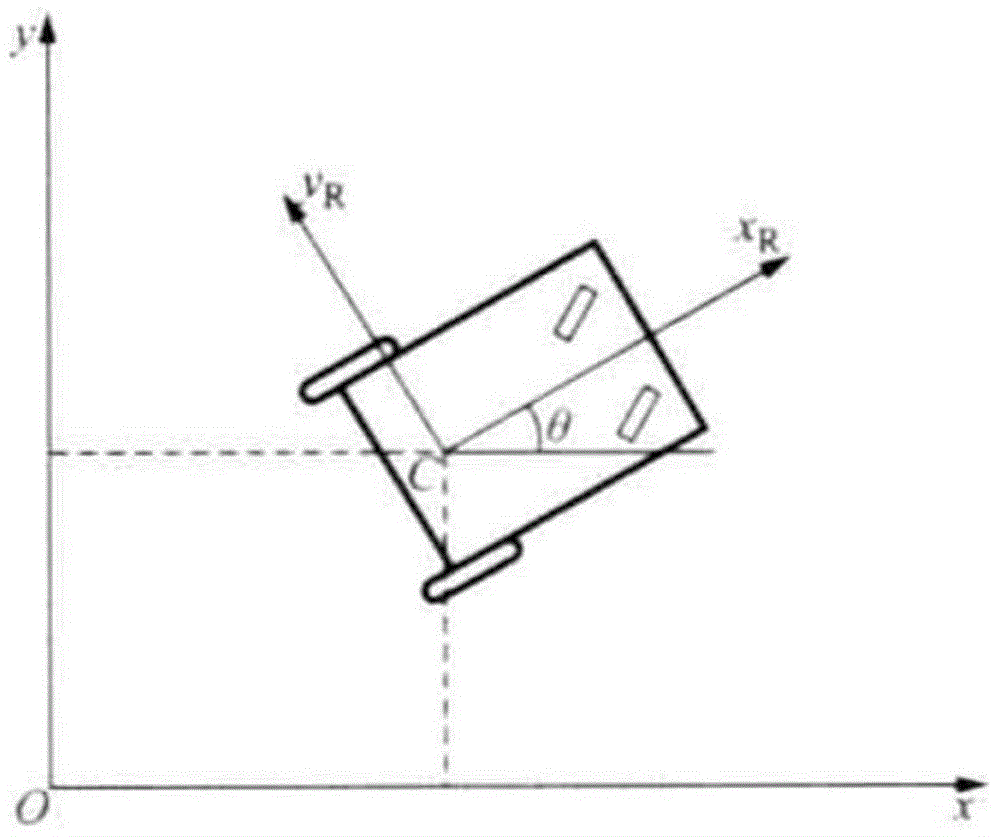
[0043] Step 1: Modeling a single mobile robot
[0044] Such as figure 1 As shown, arbitrarily select a point in the plane space, set this point as the origin O, establish a global coordinate system at this point and select two mutually orthogonal directions as the x-axis and y-axis. For the mapping of the local coordinate system to the global coordinate system, point C, the axis point of the robot, is selected as the origin of the local coordinate axis. In general, point C is considered to be the center of gravity of the robot. In the local coordinate system, use {x ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More