

Parallel ankle joint rehabilitation robot
A rehabilitation robot and ankle joint technology, applied in the field of rehabilitation robots, can solve problems such as complex structure of the device, and achieve the effects of small volume and weight, high interchangeability, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
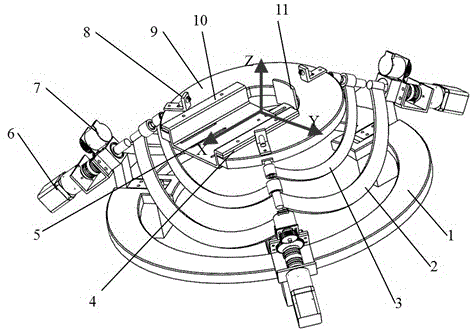
[0012] The technology of the present invention will be further described below by means of accompanying drawings and examples.
[0013] The technical solution of the present invention is: an ankle joint rehabilitation robot, including a base 1, a lower link 2, an upper link 3, an adjustment pad 4, an adjustment hole 5, a motor 6, an absolute encoder 7, a laser 8, a dynamic Platform 9, foot plate 10, heel support 11, it is made up of three identical branches connecting base 1 and moving platform 9, the structure of each branch is: the shell of motor 6 is fixed on the base 1, and the motor 6 The extension shaft of the upper layer is fixedly connected with the lower connecting rod 2, the lower connecting rod 2 and the upper connecting rod 3 are connected by the first rotating pair A, and the upper connecting rod 3 and the moving platform 9 are also connected by the second rotating pair B, and the motor 6 is extended The axis of the shaft, the axes of the rotating pair A and the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More