

Filtering alignment algorithm based on Rodrigue parameters and second-order nolinear measurement
A second-order nonlinear, moving base alignment technology, applied in the field of inertial navigation, can solve problems such as divergence and filter error increase
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
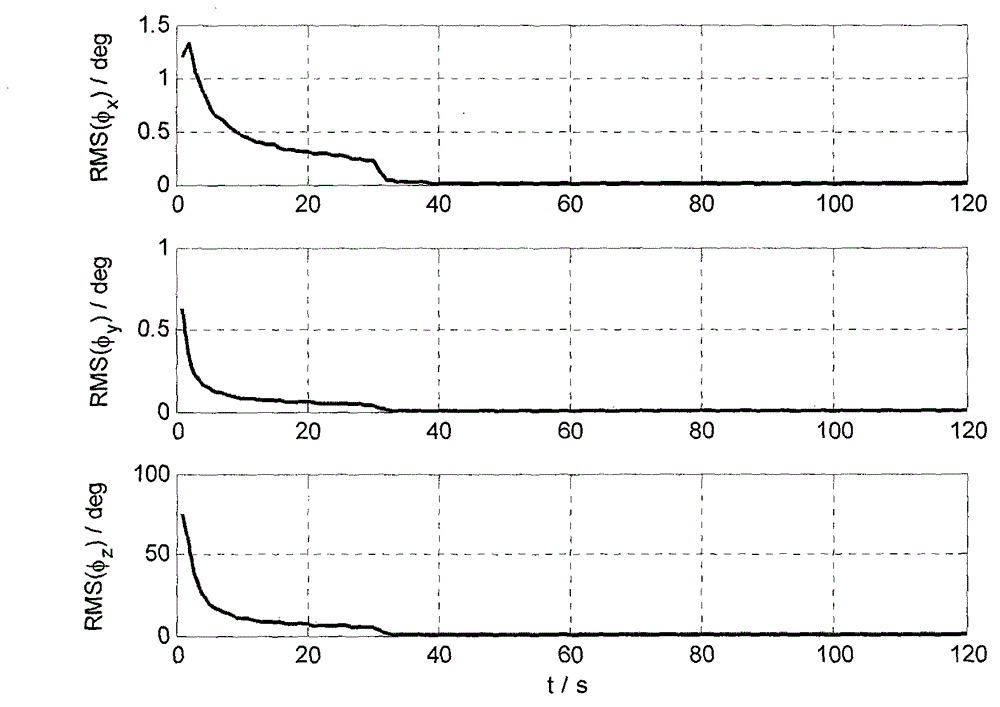
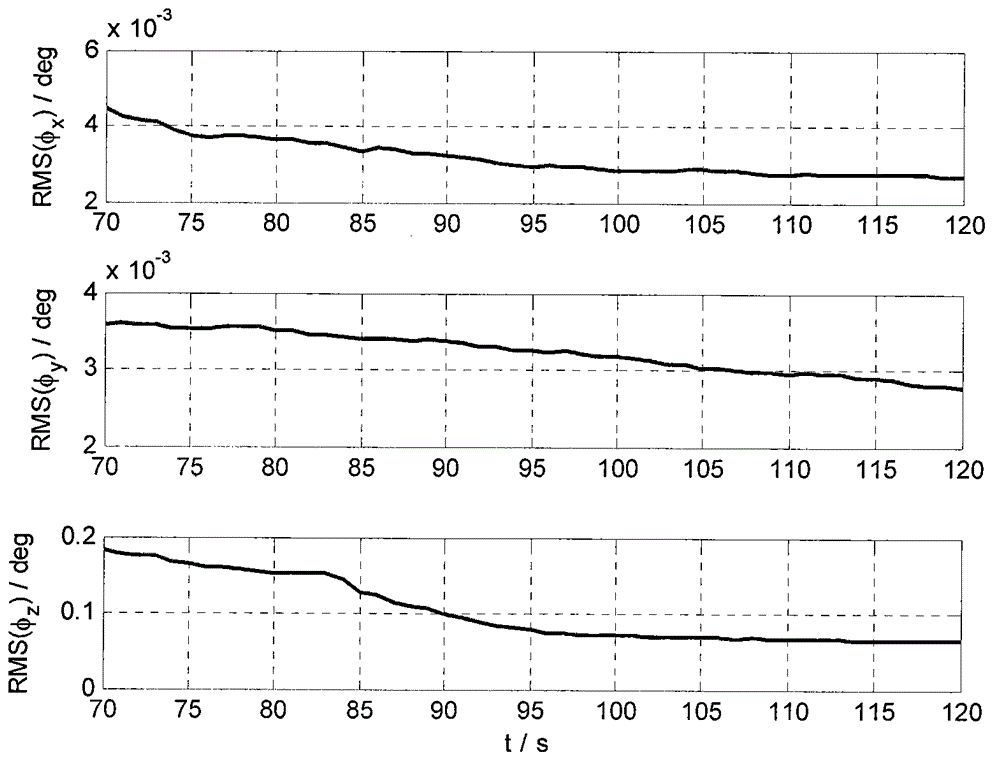
[0129] In the embodiment of the present invention, taking the alignment of the vehicle-mounted SINS / GPS moving base as an example, the simulated trajectory is: from static acceleration to 10m / s, the acceleration is 0.5m / s 2 ; Then drive at a constant speed for 50s; then turn 90° with an angular rate of 15° / s; then drive straight at a constant speed. The total alignment time is taken as 120s.
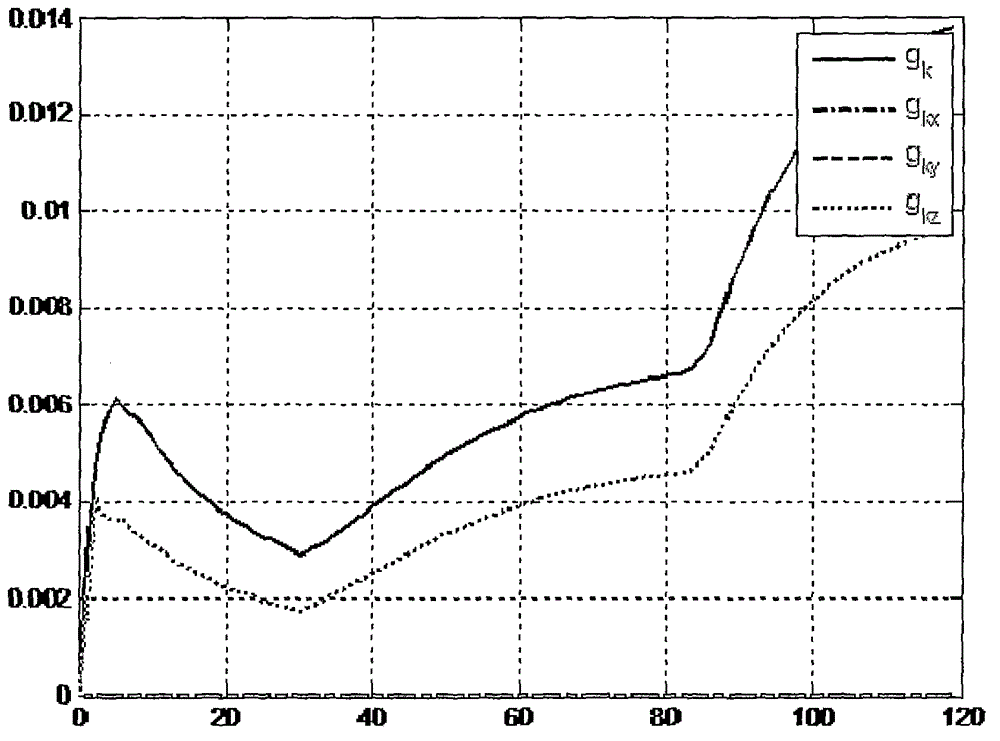
[0130] Inertial device accuracy: gyro random constant value drift is 0.01° / h, angular random walk coefficient is Accelerometer random constant bias of 5×10 -5 g, the variance intensity of accelerometer white noise is No other error terms are considered.
[0131] GPS accuracy: the speed measurement noise is 0.1m / s, the horizontal position measurement noise is 3m, the height position measurement noise is 5m, and the GPS data period is 1s.
[0132] Considering that the vehicle-mounted SINS measurement coordinate system is approximately installed with the right front upper vehicle body...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More