

Novel PI controller structure and parameter setting method thereof
A controller and a new type of technology, applied in the field of control, can solve problems such as unclear relationships and difficult controller parameter tuning, and achieve the effects of improving tracking performance, simplifying relationships, and facilitating tuning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0034] The moment of inertia of the permanent magnet synchronous motor J=2.68g·m 2 , requiring the overshoot not to exceed 13.5%.
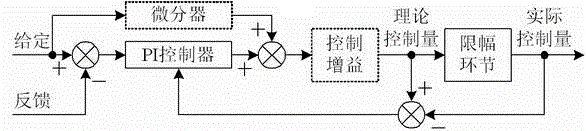
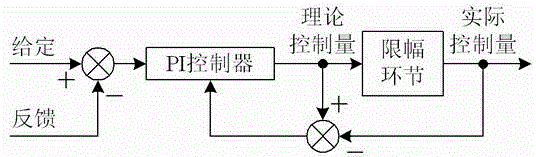
[0035] For the new structure PI controller adopted in the present invention, take the undamped natural frequency ω n =60, damping ratio ζ=1.0, then the proportional coefficient k of the controller p = 2ζω n =120, integral coefficient k i = ω n 2 =3600, control gain b=1 / J=373. When the motor parameters change, if you want the dynamic performance to remain unchanged, you only need to modify the control gain, and the proportional coefficient and integral coefficient remain unchanged. The block diagram of the traditional PI controller is as follows: image 3 As shown, because the viscous friction coefficient B is unknown, the parameters of the traditional PI controller cannot be calculated, so it needs to be manually adjusted according to the response curve. Assuming that the final control parameters of the traditional PI controller are the sa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More