

Angle compensation kinematics solving method of one kind of rod end floating type six-freedom-degree parallel robots
An angle compensation and floating type technology, applied in the field of automation, can solve problems such as complex calculation process, real-time and accuracy need to be strengthened, and initial value selection requirements are not strict
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
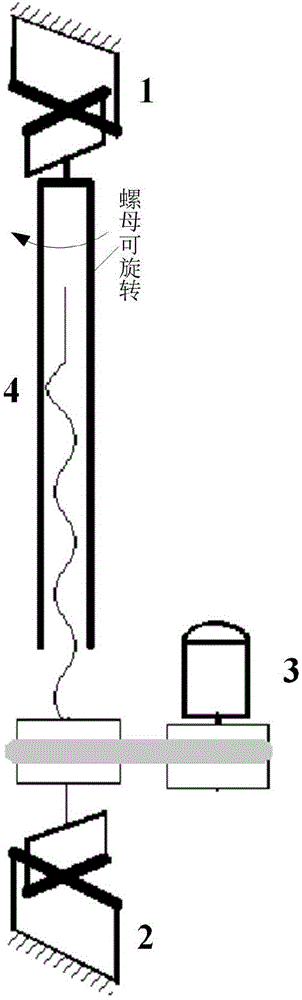
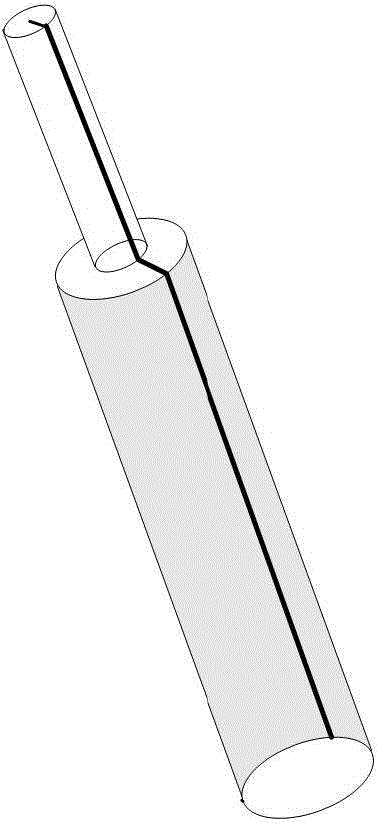
[0049] see figure 1 As shown, the rod-end floating six-degree-of-freedom parallel robot involved in the present invention includes a fixed platform and a moving platform, six fixed platform Hooke joints 2 are installed on the fixed platform, and six moving platform tiger joints are installed on the moving platform. Hooke hinge joint 1; fixed platform Hooke hinge joint 2 and corresponding moving platform Hooke hinge joint 1 are connected through rod end floating ball screw pair 4; rod end floating ball screw pair 4 are all driven by motor 3.
[0050] The specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
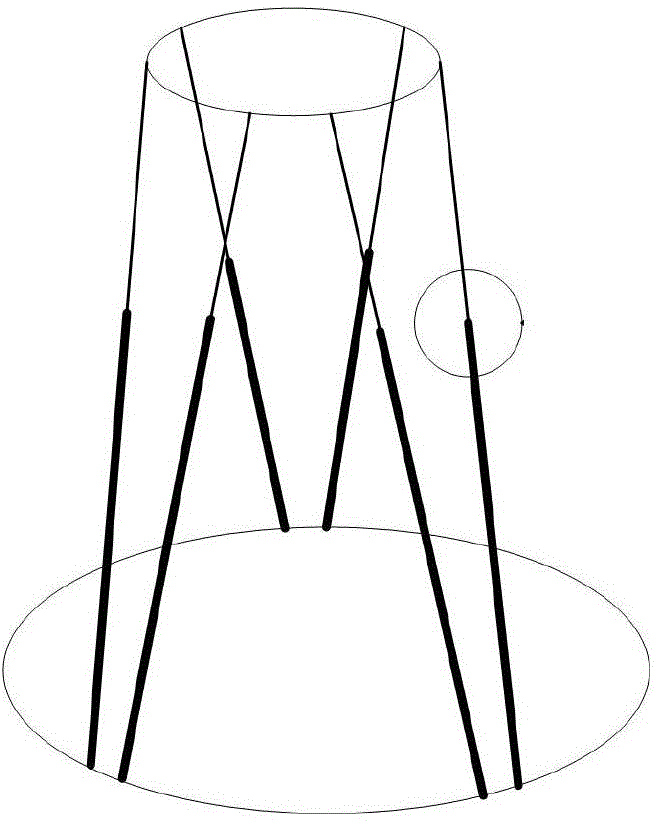
[0051] First, specify the way to establish the coordinate system, such as image 3 shown, where:
[0052] Fixed platform coordinate system O b -x b the y b z b — Order B i , i=1,2,...6 represent the center points of the six Hooke joints installed on the fixed platform, by B i The geometric cen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More