

Barrier detection method in vegetation environment based on multispectral and 3D feature fusion
A technology for obstacle detection and three-dimensional features, which is applied in image data processing, instruments, calculations, etc., and can solve problems such as greater influence of changes in light intensity and poor effect of three-dimensional point clouds
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
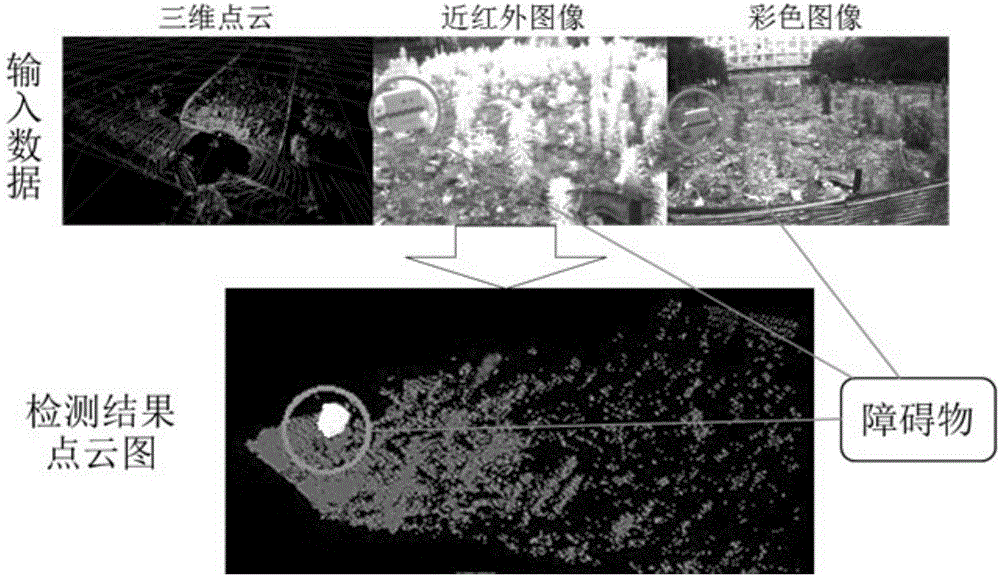
[0057] In the test of the real scene, an ordinary 5-seat off-road vehicle was used as the experimental platform, and the Velodyne HDL-64E S2 three-dimensional lidar was installed on the roof, and the Bumblebee2 binocular camera and the MER-040-60UM-L digital camera (in front of the lens) were installed in front of the vehicle. Configure a 780nm filter). Such as image 3 , the 3D lidar is used to collect 3D point cloud data; the right eye of the Bumblebee2 binocular camera is used to collect color images, hereinafter referred to as the color camera, and the color image resolution is 1024*768; the MER-040-60UM-L digital camera is used to collect Near-infrared image, hereinafter referred to as near-infrared camera, the resolution of near-infrared image is 752*476. Calibrate the internal and external parameters of the fusion sensor system, the internal parameters of the color camera are: f c =[917.2670,896.3891],k c =[-0.3217,0.1558,0.0052,0.0095,0], the external parameters bet...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More