

GPS-based automatic multi-rotor unmanned aerial vehicle tracking system
A multi-rotor unmanned aerial vehicle and automatic tracking technology, which is applied in the field of model aircraft unmanned aerial vehicles to achieve the effects of intelligent operation, reduced probability of occurrence, safe control, simple and flexible operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
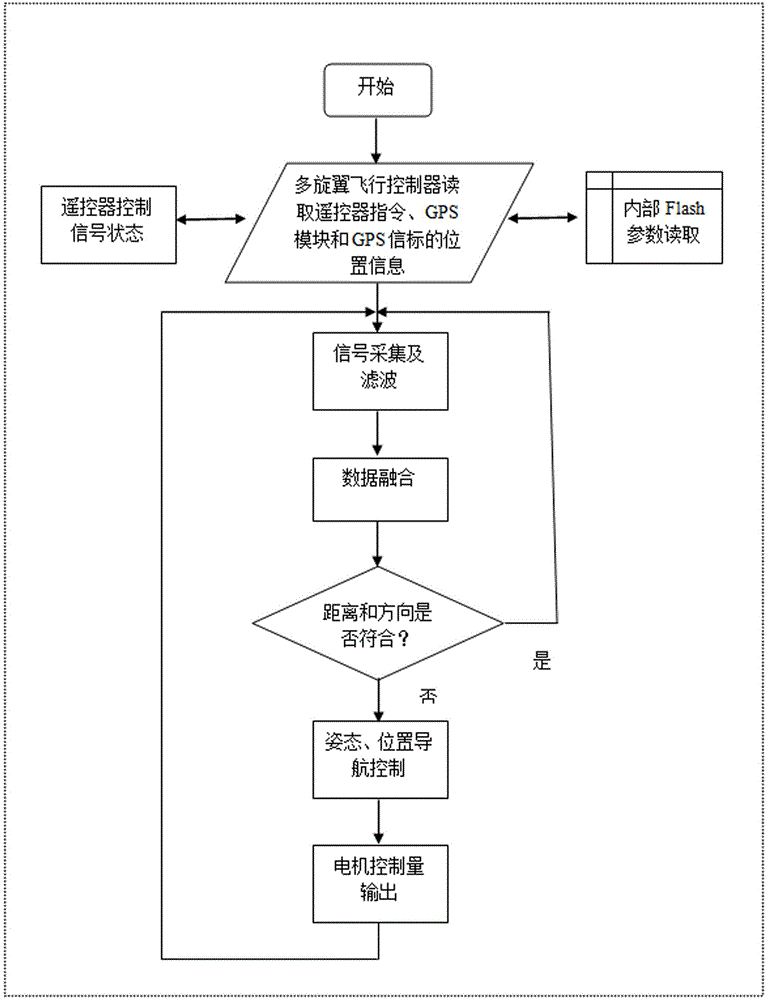
[0027] Such as image 3 As shown, the workflow of the air control part of the system is:
[0028] S301: Start by correctly installing the multi-rotor flight controller on the UAV according to the requirements of the multi-rotor UAV;
[0029] S302: Power on the system, wait for the GPS positioning module and the GPS beacon module to locate successfully, the multi-rotor flight controller reads the remote control command, the parameters of the internal Flash of the flight controller, and the position information of the GPS positioning module and the GPS beacon;
[0030] S303: Signal collection and filtering, after checking that the multi-rotor controller is working normally, take off the multi-rotor UAV. The multi-rotor flight controller adopts the Kalman filter technology to filter according to the output characteristics of the micromechanical sensor data; and the output data of the high-precision air pressure sensor contains high-frequency noise, and uses the differential meth...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More