

Six-degree-of-freedom surgical instrument by adoption of cable driving used for minimally invasive surgery
A surgical instrument and wire transmission technology, applied in the field of wire transmission medical robot equipment, can solve the problems of complicated installation and debugging, time-consuming operation, large volume, etc., and achieve the effect of solving joint reset, occupying small space and flexibly moving.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in detail below in conjunction with specific embodiments.
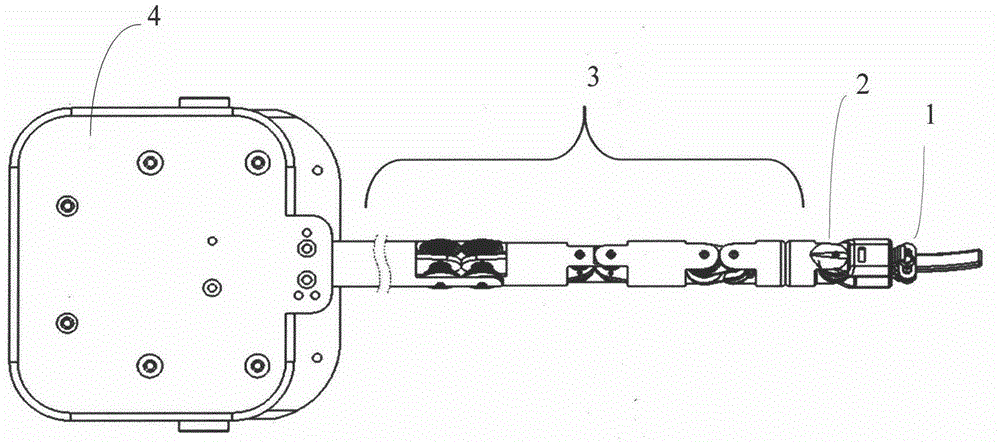
[0028] Such as figure 1 Shown is a schematic diagram of the overall structure of the present invention, the new minimally invasive surgical instrument consists of four parts: the end quick change part 1 of the surgical instrument, the end effector part 2, the main connecting rod part 3, and the power interface part 4. The power interface 4 of the surgical instrument is detailed in the published invention patent ZL200910305201.1.
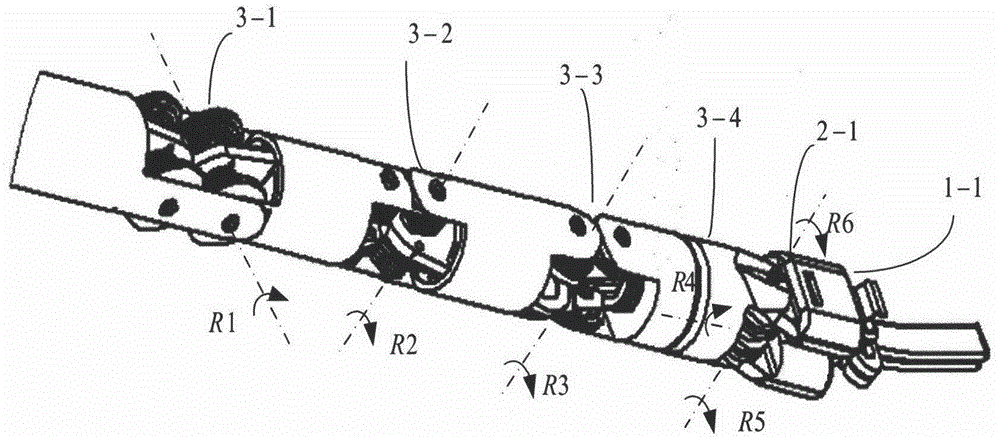
[0029] Such as figure 2 Shown is a schematic diagram of the innovative design of the core of the surgical instrument: the end quick change part 1, the end effector part 2 and the main link part 3. The connecting rod part of the main body includes a shoulder joint 3-1, an elbow joint 3-2, a wrist joint 3-3 and an autorotation joint 3-4, and the end effector part is a finger joint 2-1. Shoulder joint 3-1 provides R1 degree of freedom, elbow jo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More