

Control method of upper limb rehabilitation robot
A rehabilitation robot and control method technology, applied in passive exercise equipment, physical therapy and other directions, can solve problems such as difficult rehabilitation training or provide effective control methods for teaching, and achieve increased human-computer interaction performance, increased diversity, increased The effect of flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the present invention will now be described with reference to the accompanying drawings.
[0041] The control method of the upper limb rehabilitation robot of the present invention can be used for rehabilitation training or teaching.
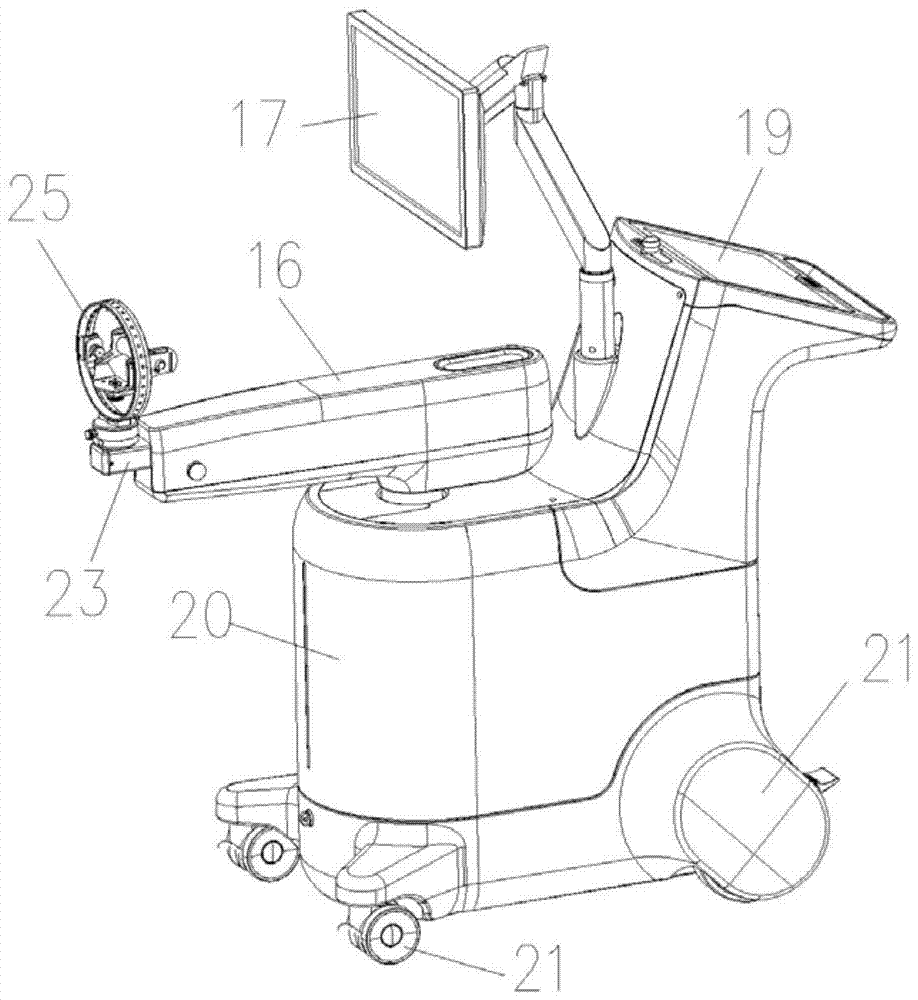
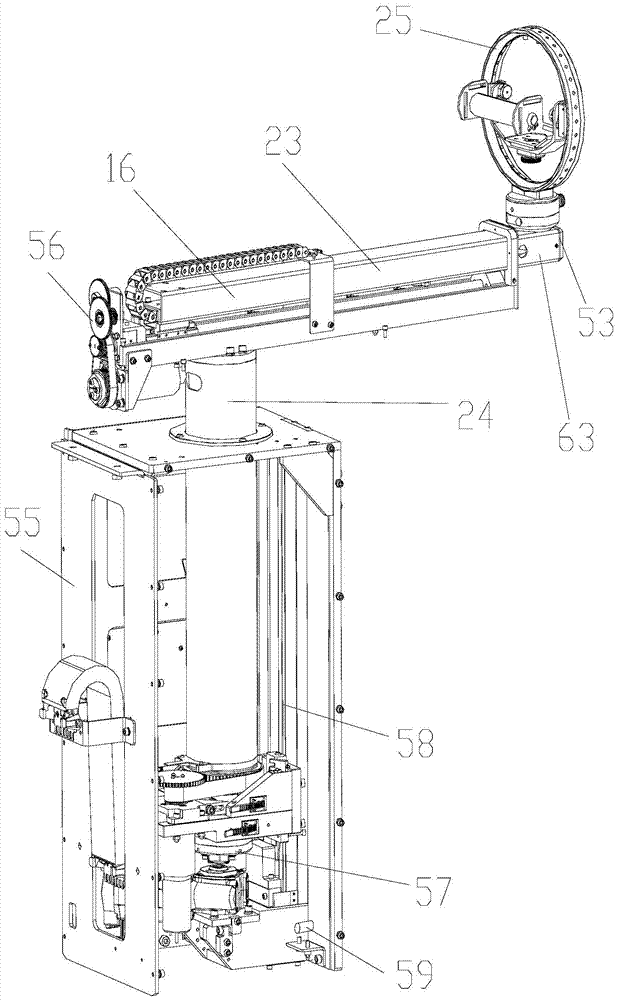
[0042] Such as figure 2 As shown, the upper limb rehabilitation robot of the embodiment of the present invention includes:
[0043] An elevating main shaft 24 capable of vertically moving up and down and rotating around the center line of the shaft, the elevating main shaft is vertical to the horizontal plane;
[0044] A telescopic arm 23 capable of telescoping in the horizontal direction is vertically connected to the top of the elevating main shaft 24;
[0045] The hand rest device 25 capable of rotating in the horizontal plane is hinged on the telescopic arm 23 , for example, located at the end of the telescopic arm 23 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More