Underground crop digging robot and control method thereof
A technology for underground crops and robots, applied in the fields of harvesters, agricultural machinery and implements, applications, etc., can solve the problems of difficult promotion and application, high development costs of agricultural robots, etc., to liberate labor costs, improve labor methods, and walk control. simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described in detail below in conjunction with the accompanying drawings, which are explanations rather than limitations of the present invention. Underground crops are described using potatoes as an example.
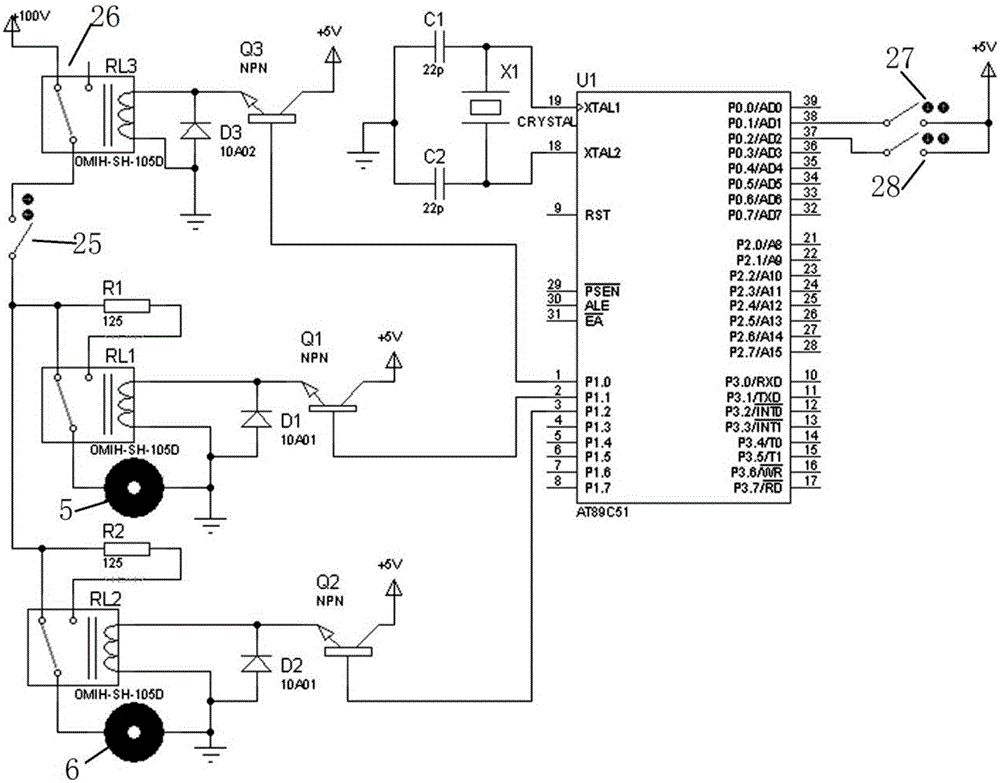
[0043] An underground crop digging robot of the present invention is mainly realized by three parts, one is a mechanical action part for digging crops, the other is a control part of a single chip microcomputer, and the third is a sensor control robot travel control part.
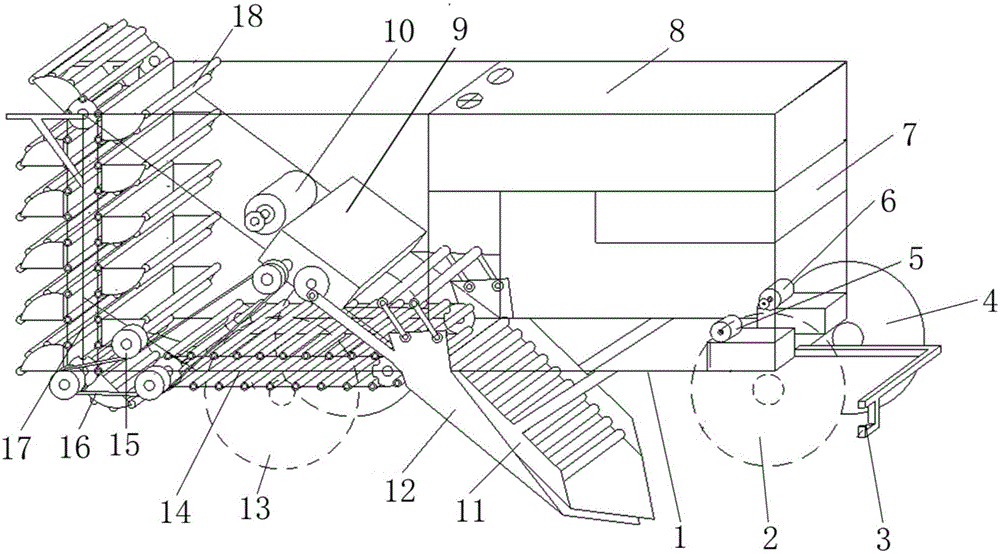
[0044] Such as figure 1 As shown, in the mechanical part of the robot, the underground crop harvesting robot includes a walking mechanism, a soil loosening mechanism, a transmission mechanism, a bagging mechanism and a control system. The traveling mechanism includes two driving wheels and two driven wheels 13 arranged at the head and tail of the frame 1 , and the two driving wheels include the right driving wheel 2 driven by the first motor 5 and the left...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com