

A foot mechanism of a large load-bearing legged robot
A robot and foot technology, applied in the field of robotics, can solve the problems of not having large load capacity and good shock absorption performance, not having self-resetting ability, and high design center of gravity, and achieve simple structure, good shock absorption performance, and low center of gravity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] The specific implementation of the present invention will be described in detail below in conjunction with the accompanying drawings and technical solutions.
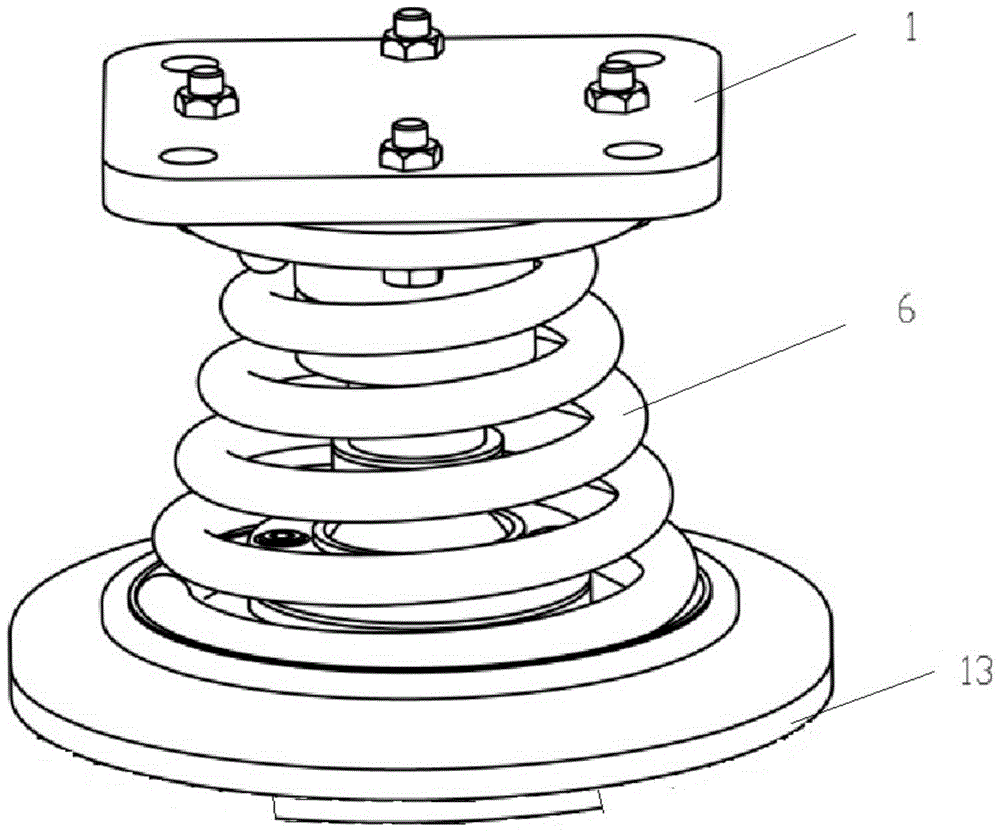
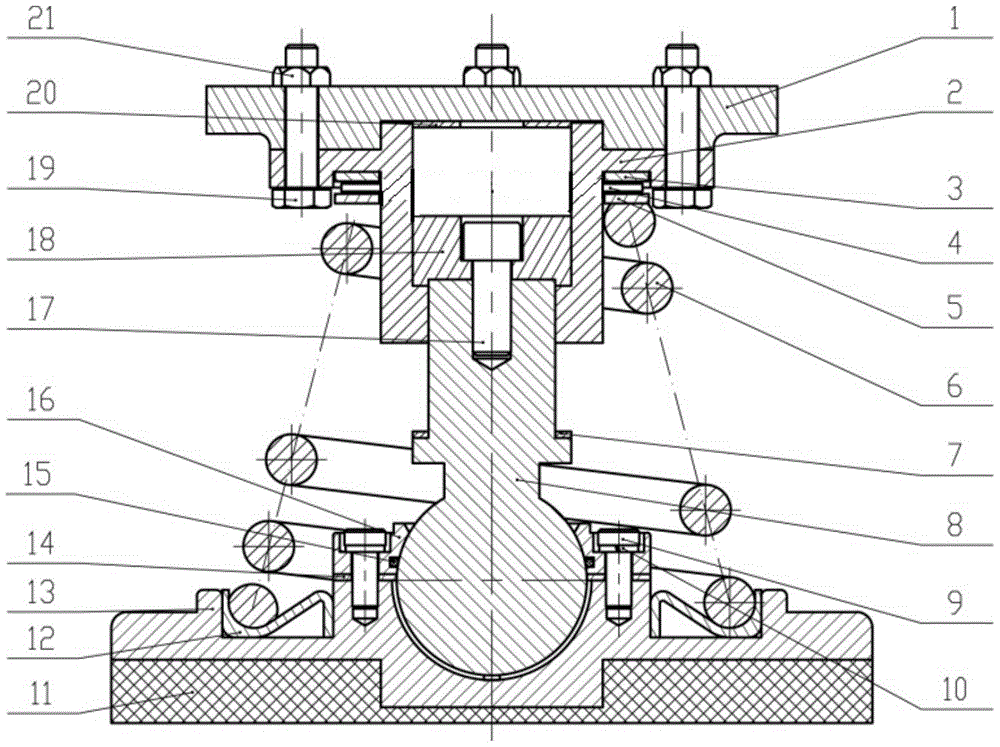
[0013] attached figure 1 , 2 It is an embodiment of the present invention. The foot mechanism of the legged robot consists of a leg connecting flange 1, an adapter plate 2, an upper bearing washer 3, a thrust needle roller bearing 4, a bearing lower washer 5, A truncated cone coil spring 6, a rubber anti-vibration pad 7, a ball head rod 8, four ball auxiliary cover plate connecting screws 9, four spring washers 10, a rubber sole anti-skid pad 11, a spring seat 12, a foot Bottom plate 13, an adjusting gasket 14, an O-ring seal 15, a ball sub-cover 16, a connecting screw 17 for the upper pressure plate of the ball head rod, 18 for the upper pressure plate of the ball head rod, four bolts 19, and a rubber shock absorber pad 20 and four nuts 21. Part of the force on the leg connection flange 1 is transmitted to th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More