

Automatic grabbing manipulator capable of adapting to motor rotors with different diameters
A technology for grasping manipulators and motor rotors, applied in metal processing and other directions, can solve the problems of labor shortage, short processing time, low processing efficiency, etc., and achieve the effects of high efficiency, simple structure, low cost, and labor cost saving.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described below in conjunction with the accompanying drawings.
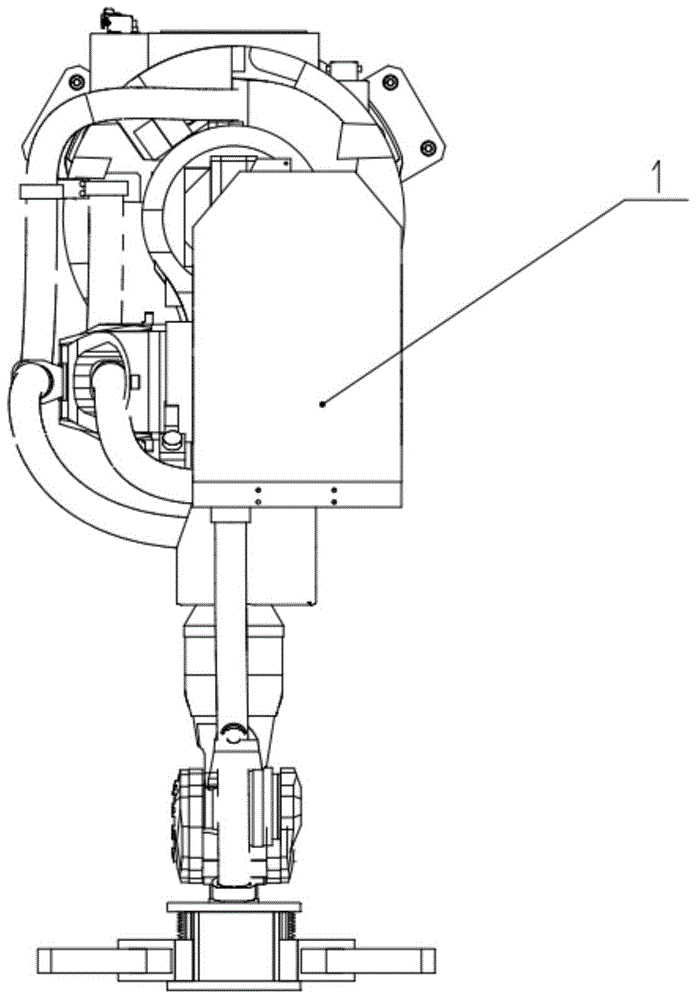
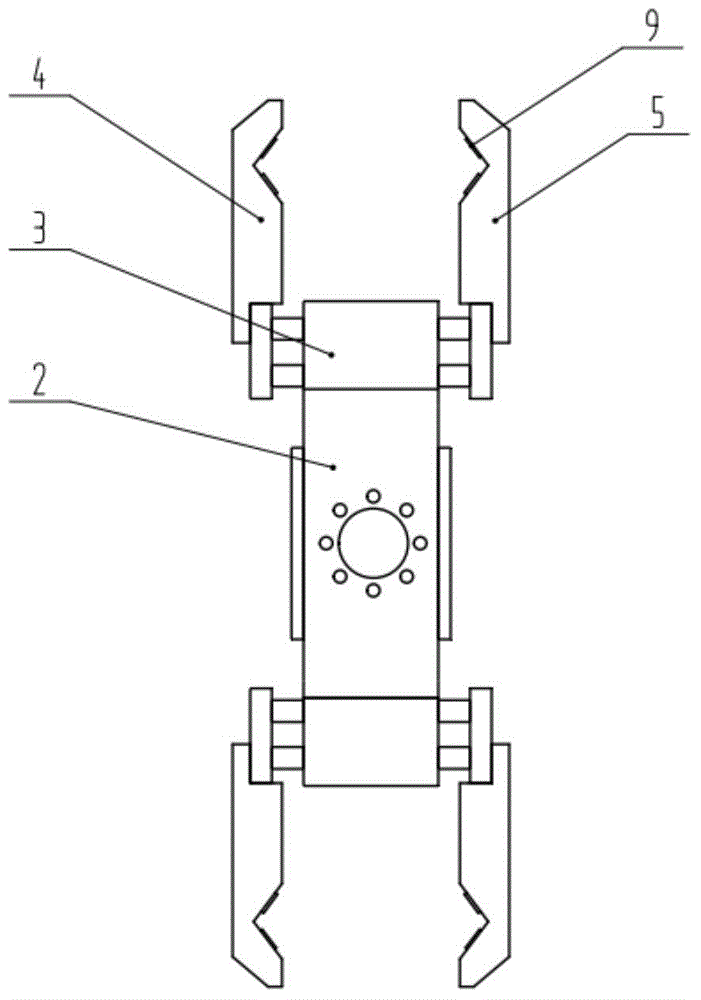
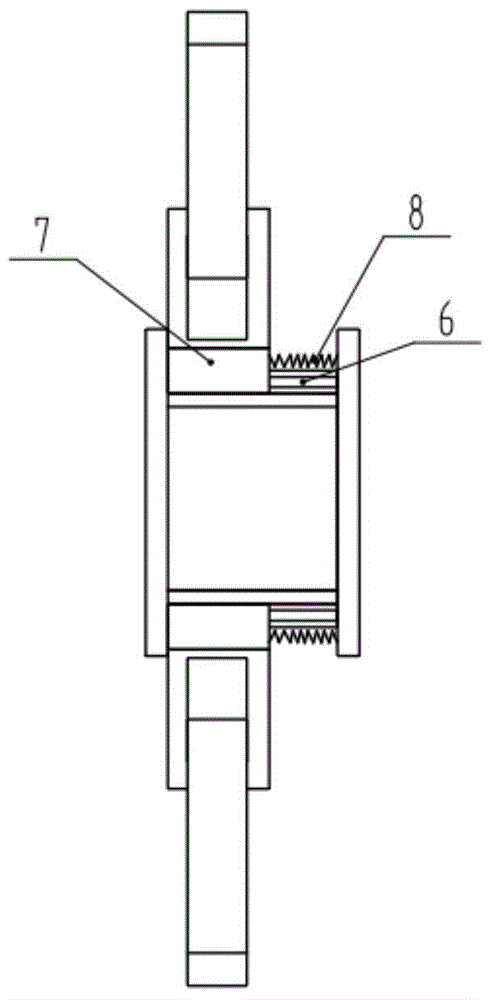
[0018] as attached figure 1 to attach image 3 An automatic grasping manipulator that can adapt to motor rotors with different diameters is shown, including an industrial robot 1, a cylinder frame 2, a parallel cylinder 3, a first grasping finger 4 and a second grasping finger 5, and the cylinder frame 2 is equipped with Two parallel cylinders 3, all parallel cylinders 3 are evenly distributed and installed relative to the rotation center circumference of the end of the industrial robot 1; the first grasping finger 4 and the second grasping finger 5 are fixedly connected to the two translation units of the parallel cylinders respectively . There are slide rails 6, slide blocks 7 and return springs 8 between each parallel cylinder 3 and the cylinder frame 2, the slide rails 6 are installed on the cylinder frame 2, the slide blocks 7 are fixedly connected with the para...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More