

Precision outward staying type intelligent industrial robot actuator
An industrial robot and intelligent technology, applied in the direction of manipulators, manufacturing tools, chucks, etc., can solve the problems of not allowed to touch, general-purpose actuators cannot complete the work, etc., to achieve convenient adjustment, fewer actuator components, and ensure safe production Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be described in further detail below with reference to the accompanying drawings and specific embodiments.
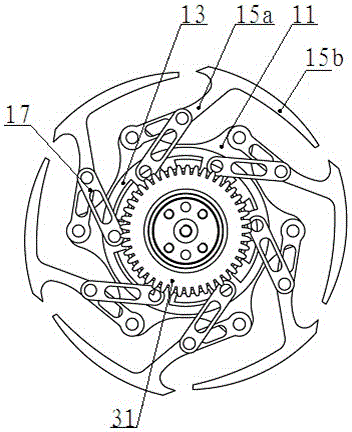
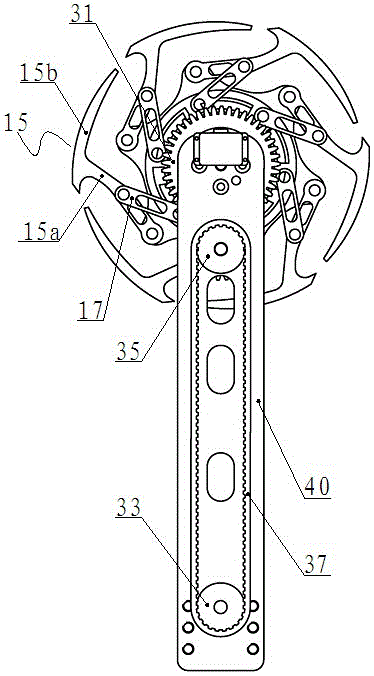
[0019] like figure 1 and figure 2 As shown, a precision external support type intelligent industrial robot actuator includes a drive mechanism, a transmission mechanism and an actuator.
[0020] The actuator includes a chassis 11, a turntable 13, a plurality of external support grippers 15, and a plurality of connecting rods 17 corresponding to the external support grippers 15 one-to-one;
[0021] One end of the outer support gripper 15 is fixed on the chassis 11, and a plurality of outer support grippers 15 are evenly distributed on the circumferential edge of the chassis 11, and an even number of outer support grippers are preferentially selected, and the outer support gripper 15 is opened to form a round face.
[0022] During specific implementation, the outer support gripper may preferably adopt the following structure: the oute...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More