

Humanoid lower limbs driven by pneumatic artificial muscles
A pneumatic artificial muscle and human-like technology, applied in the field of humanoid robots and robots, can solve problems such as poor compliance, low energy efficiency of robots, complex system structure, etc., achieve a large power/mass ratio, improve energy efficiency, and simple system structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
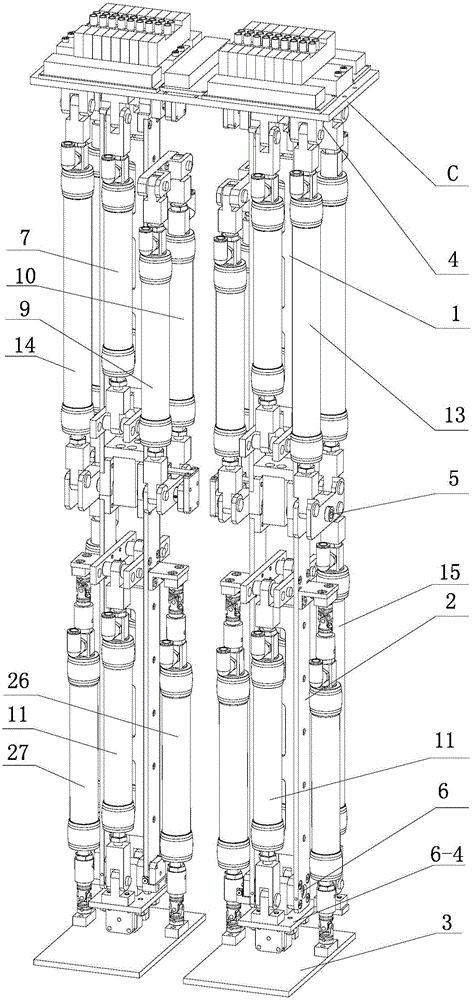
[0011] Specific implementation mode one: combine Figure 1-Figure 8 Explain that a humanoid lower limb driven by pneumatic artificial muscles in this embodiment includes left leg A, right leg B and pelvis C; left leg A and right leg B include thigh 1, calf 2, foot 3, hip Joint 4, knee joint 5, upper ankle joint 61 and lower ankle joint 62;
[0012] The left leg A and the right leg B are connected through the pelvis C, the pelvis 3 is connected with the thigh 1 through the hip joint 4, the thigh 1 is connected with the lower leg 2 through the knee joint 5, and the lower leg 2 is connected with the ankle joint plate 6-4 through the upper ankle joint 61 Rotational connection; the ankle joint plate 6-4 is rotationally connected with the foot 3 through the lower ankle joint 62, the axes of the hip joint axis 4-1, the knee joint axis 5-1 and the upper ankle joint axis 6-1 are parallel, and the upper ankle joint The axial direction of the axis 6-1 is perpendicular to the axial direc...
specific Embodiment approach 2
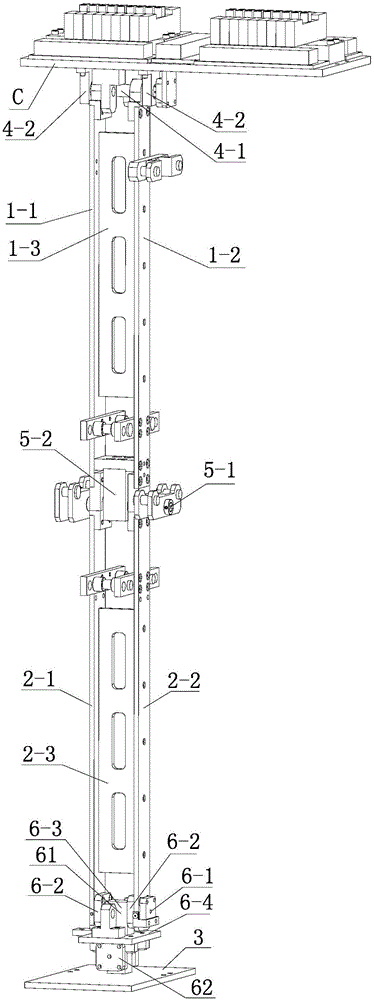
[0017] Specific implementation mode two: combination figure 2 and image 3 Illustrate, each thigh 1 of present embodiment comprises outer thigh board 1-1, inner thigh board 1-2 and thigh support board 1-3; The thigh support plate 1-3 connected by the two, the hip joint 4 includes two first bearing assemblies 4-2, the two first bearing assemblies 4-2 are installed on the pelvis C respectively, and the hip joint shaft 4-1 is rotated and installed on the On the two first bearing assemblies 4-2, the inner leg plate 1-2 and the outer thigh plate 1-1 are respectively connected with the hip joint shaft 4-1. In this implementation, the outer thigh plate 1-1 and the inner thigh plate 1-2 are connected to the hip joint shaft 4-1 through a flat key, so that when the hip joint shaft rotates, the thigh is driven to rotate. Others are the same as in the first embodiment.
specific Embodiment approach 3
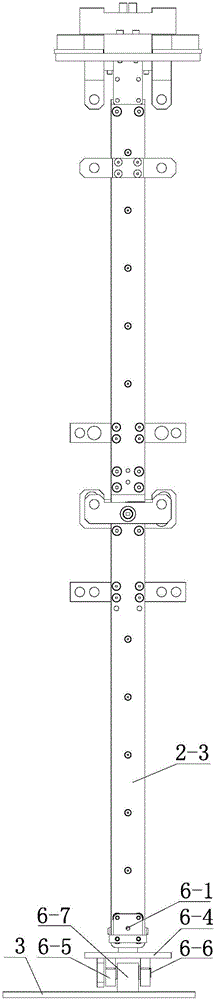
[0018] Specific implementation mode three: combination figure 2 and image 3 Illustrate, each calf 2 of present embodiment comprises calf outer plate 2-1, calf inner plate 2-2 and thigh supporting plate 2-3; The calf support plate 2-3 connected by the two, the knee joint 5 includes the second bearing assembly 5-2, the upper ankle joint 61 includes two third bearing assemblies 6-2, and the lower ankle joint 62 includes two fourth bearing assemblies 6 -5;
[0019] The second bearing assembly 5-2 is fixed on the outer thigh plate 1-1 and the inner thigh plate 1-2, the knee joint shaft 5-1 is installed on the second bearing assembly 5-2, and the upper part of the outer leg plate 2-1 and the top of the calf inner plate 2-2 are respectively fixed on the knee joint shaft 5-1, and the lower parts of the calf outer plate 2-1 and the calf inner plate 2-2 are respectively equipped with a third bearing assembly 6-2, and the upper ankle The joint shaft 6-1 is installed on the two third...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More