

Transformable-crawler suspension bracket and robot moving platform with same
A crawler frame and crawler technology, which is applied in the field of robots, can solve the problems of non-adjustable W-shaped track suspension shape, limited terrain passability and environmental adaptability, and inability to overcome the terrain environment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0071] refer to Figure 1 to Figure 8 ;
[0072] The technical solution adopted by the present invention to solve its technical problems is:
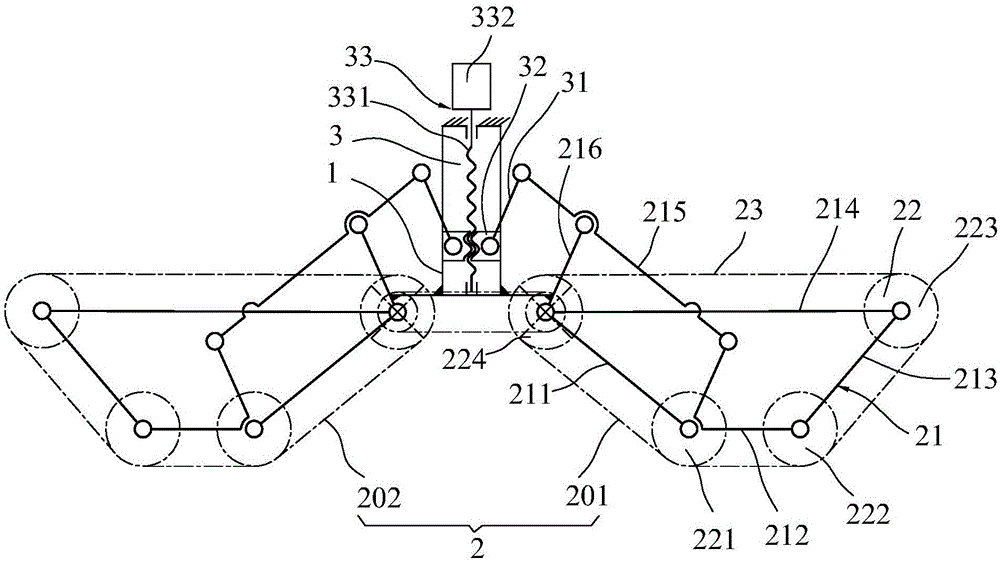
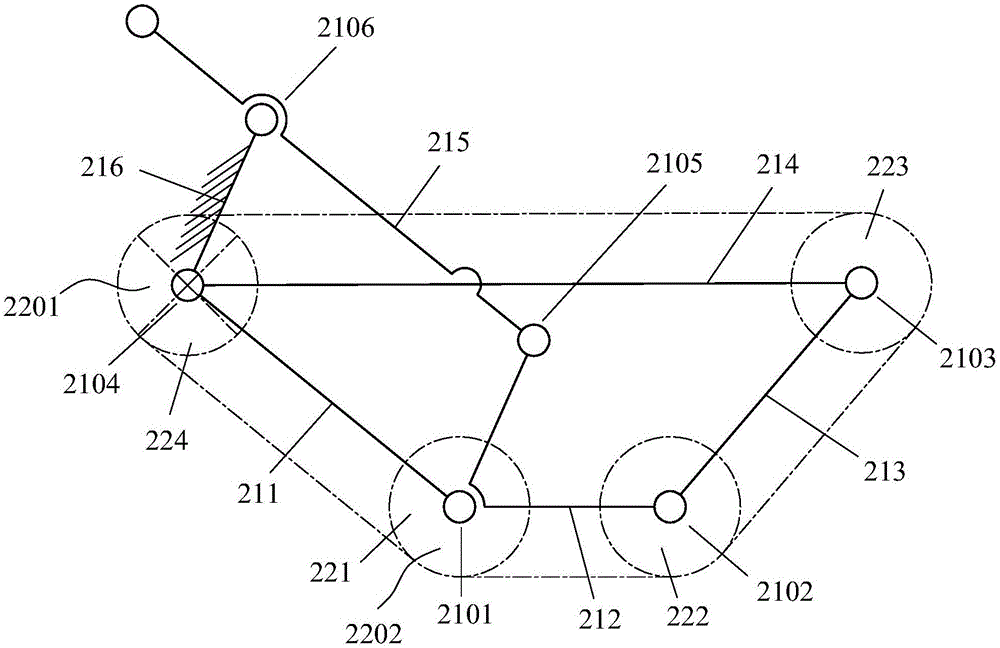
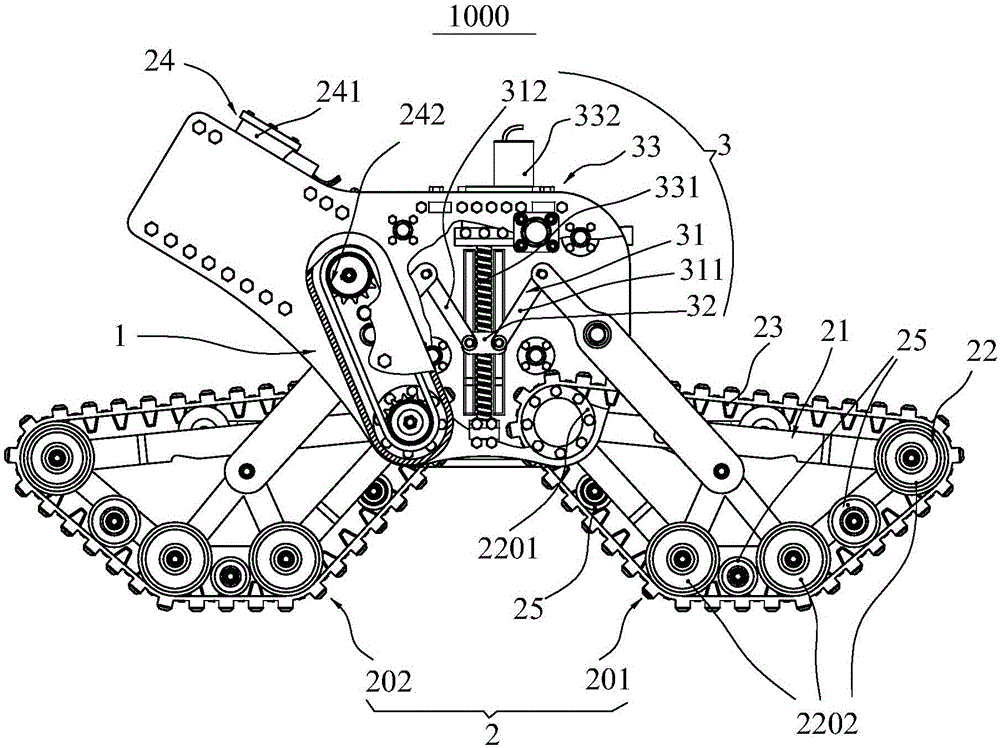
[0073] Such as figure 1 It is a schematic diagram of a deformed crawler suspension according to Embodiment 1 of the present invention, figure 2 It is a schematic diagram of a deformed crawler unit. A deformed crawler suspension 1000 according to Embodiment 1 of the present invention includes: an intermediate coupling frame 1 , a deformed crawler unit 2 and a deformed driving assembly 3 . There are two deformed crawler units 2 , including a first deformed crawler unit 201 and a second deformed crawler unit 202 , and the two deformed crawler units 2 are connected to the intermediate coupling frame 1 and arranged symmetrically front and rear.
[0074] Such as figure 2 , 3, 4, 5, and 6, the deformed crawler unit 2 includes a deformed crawler frame 21, a crawler wheel 22, a crawler belt 23, and a crawler belt drive assembly 24. The d...
Embodiment 2
[0083] refer to Figure 10 to Figure 12 ;
[0084] As an alternative implementation, such as Figure 10 to Figure 12 It is a schematic diagram of a deformed track suspension according to Embodiment 2 of the present invention, and the number of track wheels 22 is five. Wherein four crawler wheels 22 are respectively recorded as being connected with four rotating pairs of four-bar kinematic chain 210, identical with the deformation crawler unit 2 of embodiment one, and another crawler wheel is respectively marked as the fifth crawler wheel 225, the fifth crawler wheel 225 links to each other with the first bar 211 of four-bar kinematic chain 210, and the center of the fifth crawler wheel 225 is at the outside of the connecting line between the two ends of the first bar 211; The center of the rotation pair forms a triangle; in this embodiment, the sixth rod 216 is the frame of the six-bar mechanism, and shares the structure with the intermediate coupling frame 1 . The track 23...
Embodiment 3
[0087] refer to Figure 13 to Figure 18 ;
[0088] As an alternative implementation, such as Figure 13 , Figure 14 and Figure 15It is a schematic diagram of a deformed crawler suspension according to Embodiment 3 of the present invention, showing its highest position, middle position and lowest position respectively. The number of track wheels 22 in this embodiment is six, and four track wheels 22 are respectively recorded as being connected with four rotating pairs of the four-bar kinematic chain 210, which is the same as the deformed track unit 2 of embodiment one; the other two track wheels The wheels are respectively marked as the fifth track wheel 225 and the sixth track wheel 226, the fifth track wheel 225 is connected with the first bar 211 of the four-bar kinematic chain 210, and the center of the fifth track wheel 225 is at the two ends of the first bar 211. The outside of the connecting line between the centers; and the center of the fifth track wheel 225 form...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More