Robot autonomous walking method
A robot, walking mode technology, applied in two-dimensional position/channel control and other directions, can solve the problems of inaccurate positioning, high cost, poor real-time performance, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
[0055] A method for autonomous walking of a robot of the present invention, the method adopts a robot system, the system includes a walking robot, and a processor and an image acquisition device are installed on the robot; the processor includes a processor, a storage device, an input device and an output device. Equipment, the processor is equipped with an operating system and application programs; in this example, the robot is a robot with left and right two-wheel drive, the processor is a tablet computer, and the tablet computer is composed of a processor, SD card, touch screen, and display. The computer is equipped with an operating system and application programs; the image acquisition device is a 2 million color camera; to realize the autonomous walking of the robot; the steps of the method for realizing the autonomous walking of the robot are as follows:
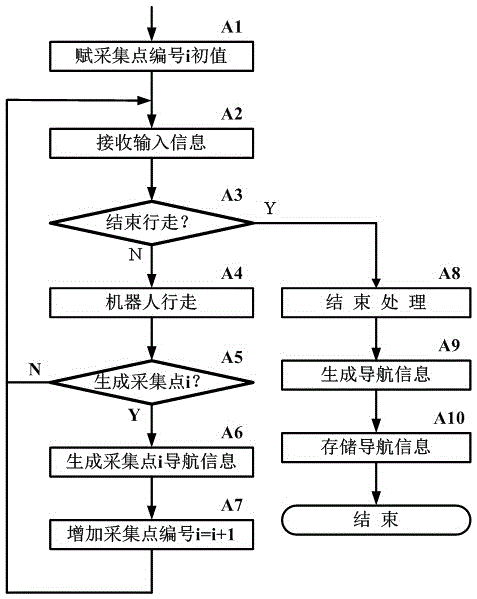
[0056] A. Generate navigation information;
[0057] Wherein, step A. The steps of generating navigation information...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com