

Novel cable-driven three-fingered dexterous hand
A rope-driven, three-finger technology, applied in the field of new rope-driven three-finger dexterous hands, can solve the problems of lack of force control, poor reliability and versatility, lack of flexibility, etc., to achieve high grasping operation, high repetition, The effect of broad application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to make the technical solutions, technical features, objectives and functions of the present invention easy to understand, the following will be further elaborated in conjunction with specific implementation methods.
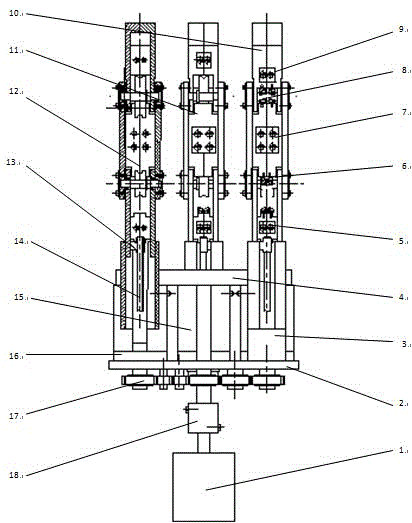
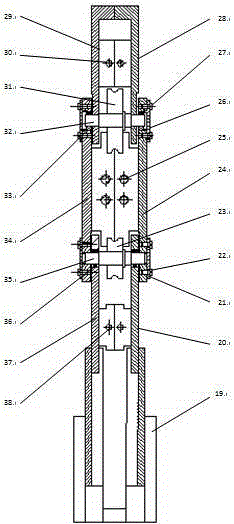
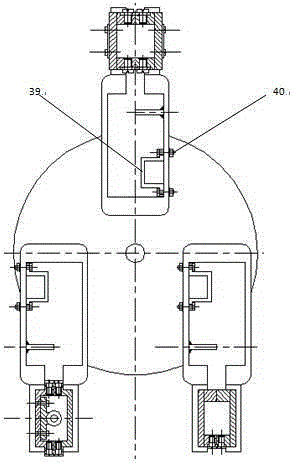
[0018] Such as figure 1 , figure 2 , image 3 , Figure 4 As shown, a novel rope-driven three-finger dexterous hand is characterized in that it includes a fixed base 2 for installing a palm 4, a fixed finger 11, a moving base 16 and is connected with a rotating finger rotation mechanism 17; Two moving bases 16, fixed fingers 11 and palm 4 are set, and the rotating fingers A10 and rotating fingers B12 are respectively fixedly installed on the two moving bases 16, and the moving base 16 can rotate around the fixed base 2; the lower part of the fixed base 2 A rotating finger rotating mechanism 17 is provided, and one end of the rotating finger rotating mechanism 17 is connected with the two motion bases 16 , and the other end is connected with t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More