

Swing arm type single-wheel wire-walking robot
A swing-arm, robotic technology, applied in manipulators, motor vehicles, manufacturing tools, etc., can solve the problems of not considering the balance effect of wire robots, failing to effectively simulate the mechanical behavior of flexible wire ropes, etc., and achieve the effect of reducing complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solutions of the present invention will be further described below with reference to the embodiments shown in the accompanying drawings.
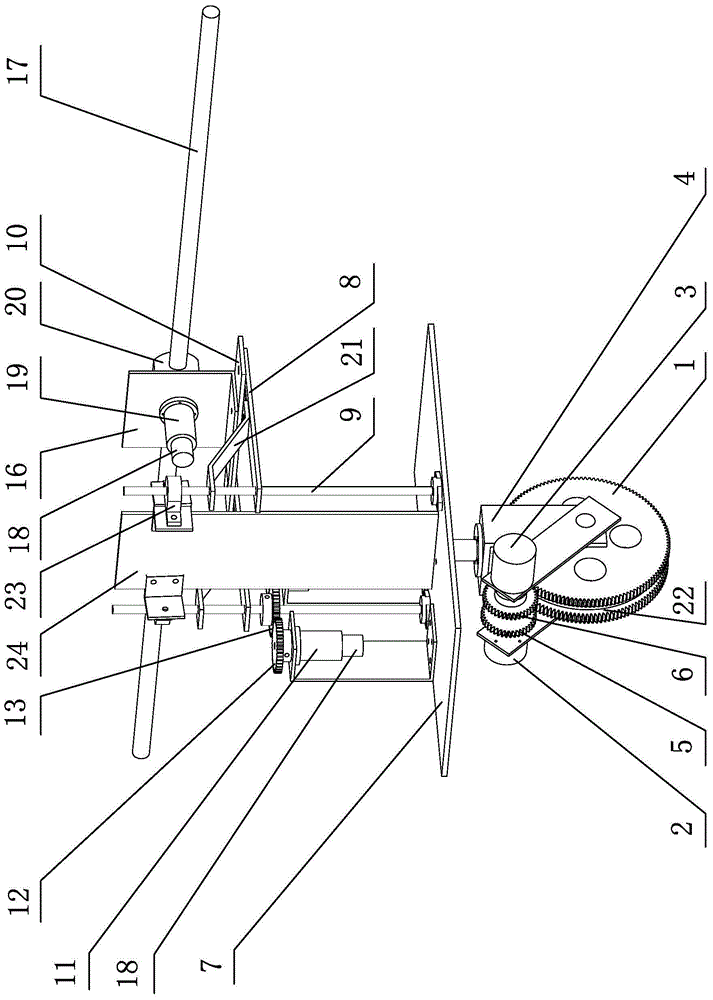
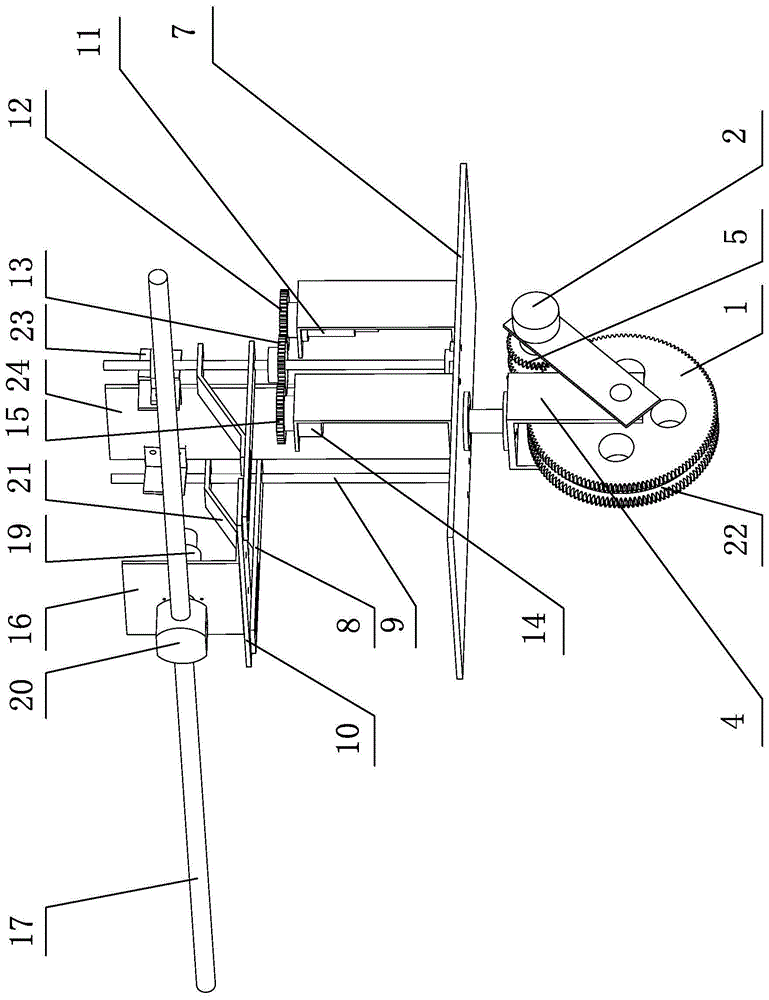
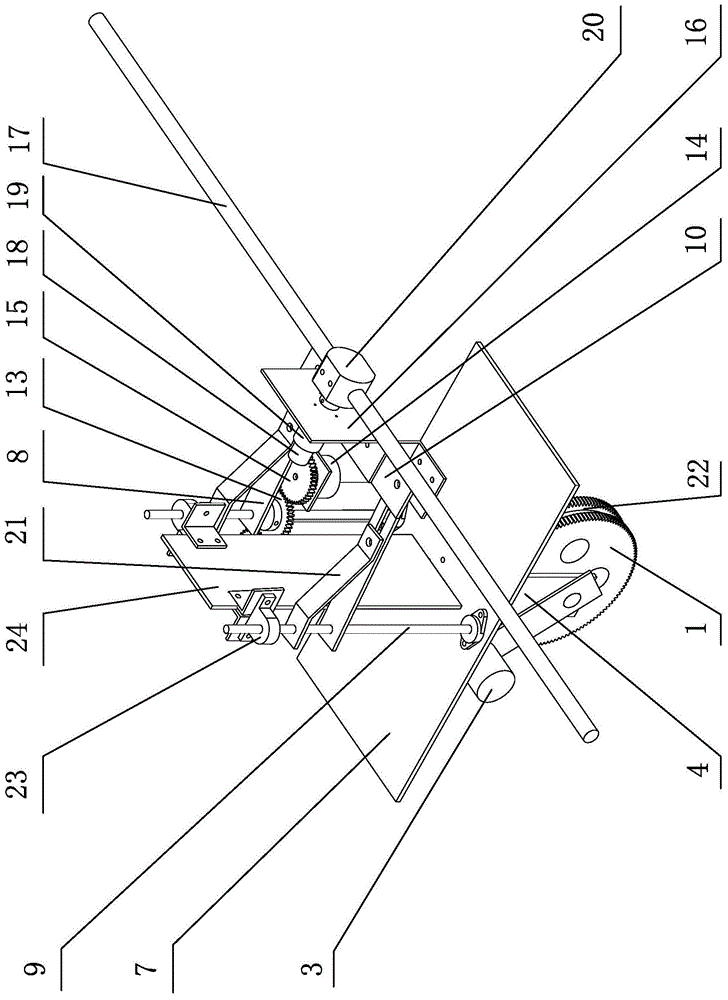
[0020] The mechanical components of the swing arm type unicycle wire walking robot of the present invention include a balance bar mechanism, a swing arm mechanism and a unicycle mechanism, the swing arm mechanism is established on the unicycle mechanism, and the balance bar mechanism is established on the swing arm mechanism.
[0021] The wheel mechanism includes a traveling gear 1 , a traveling gear drive motor 2 and an incremental encoder 3 . The traveling gear 1 is placed in a wheel frame 4 , and the axles on both sides of the traveling gear 1 are on the two side plates of the wheel frame 4 . Installed on the top, the center of the tooth surface of the outer circumference of the traveling gear 1 is provided with a V-shaped groove 22 (the corresponding groove of the wire), the outer sides of the two side plates of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More