

Robot grabbing method and system
A robot and functional relationship technology, applied in the field of robotics, can solve the problems of difficulty in grasping a type of workpiece, inability to guarantee real-time and reliability, and slow grasping.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
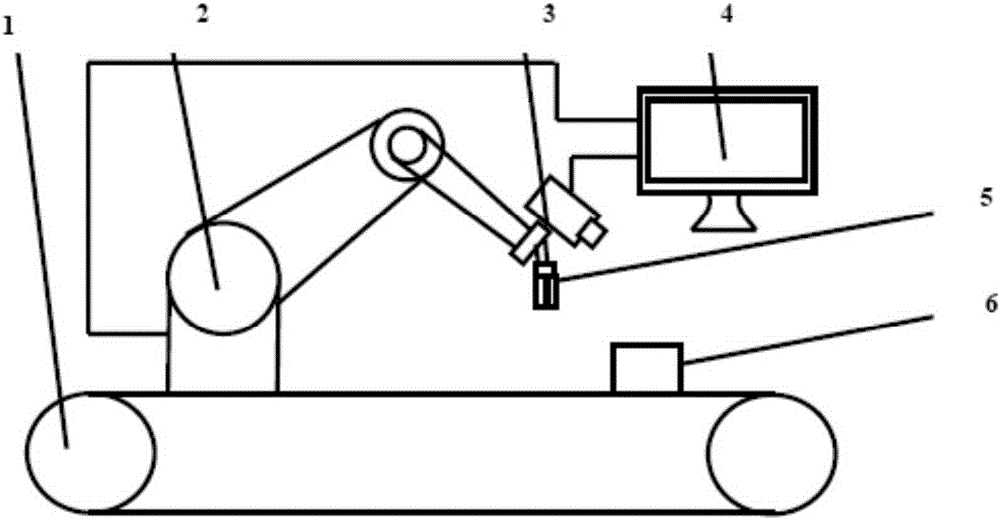
[0062] as attached figure 1 As shown, a robot grasping system based on the fusion of visual and environmental attraction domains includes a robot 2, a camera 3, a remote control computer 4, a four-finger gripper 5 and a workpiece 6; the four-finger gripper 5 and the camera 3 are fixed on the robot 2. At the end of the sixth axis (that is, the end of the axis connected to the end effector), the image plane of the camera 3 is set to be perpendicular to the direction of the fingers of the four-fingered gripper 5; the camera 3, the remote control computer 4 and the robot 2 are electrically connected in turn. Optionally, the system may also include a conveyor belt 1 .
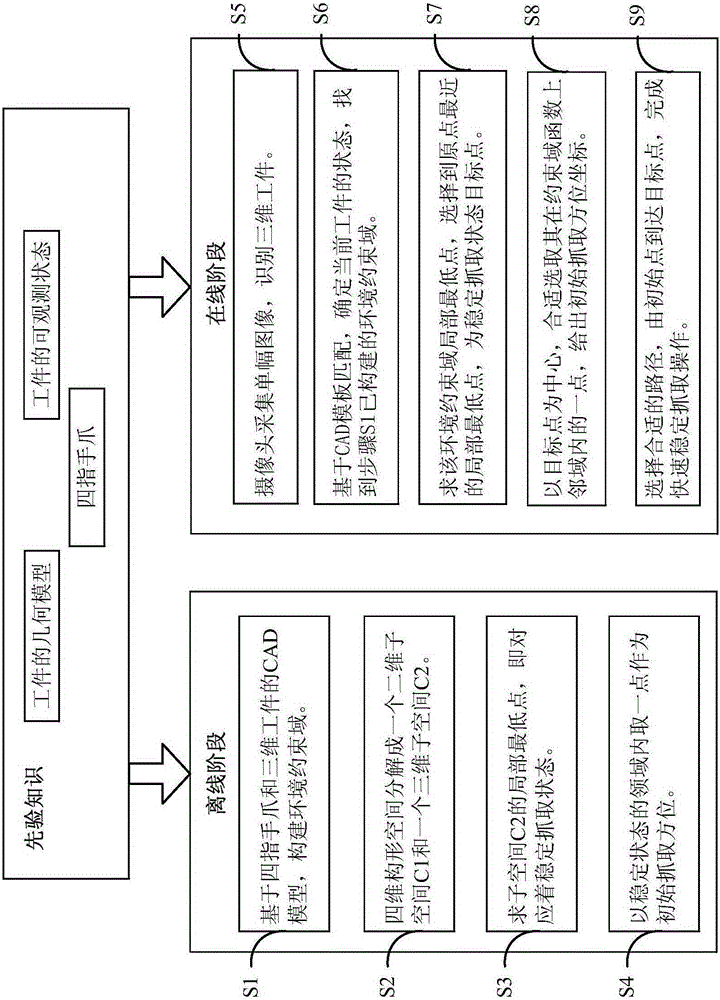
[0063] as attached figure 2 As shown, a robot grasping method based on the fusion of visual and environmental attraction domains includes the following steps:
[0064] offline stage
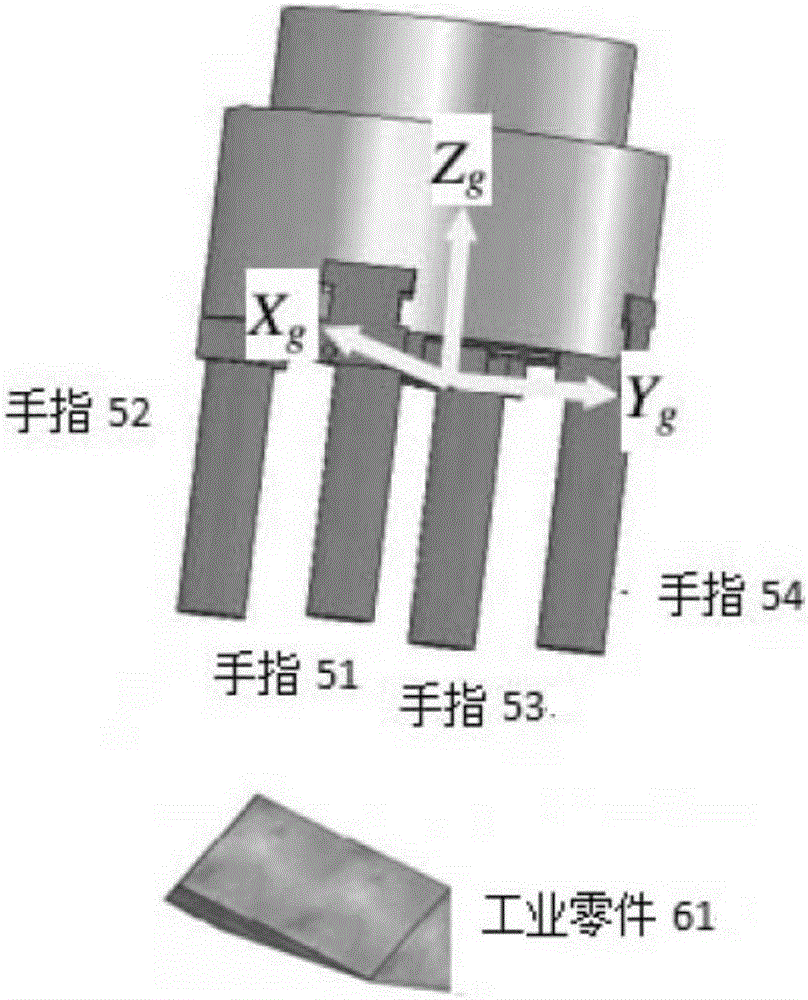
[0065] Step S1: If a four-fingered gripper is used to grab a convex hexahedron workpiece, firstly establish a gripper coordinate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More