Identifying method for lifting and putting down electric self-balancing monocycle
An identification method and unicycle technology, applied in motor vehicles, bicycles, motorcycles, etc., can solve problems such as low user experience and potential safety hazards, and achieve the effects of low computational complexity, improved user comfort, and guaranteed reliability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
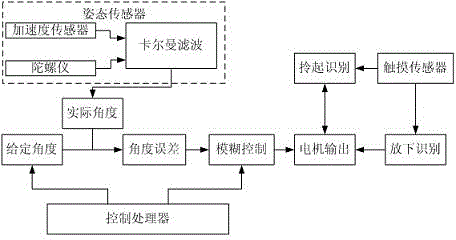
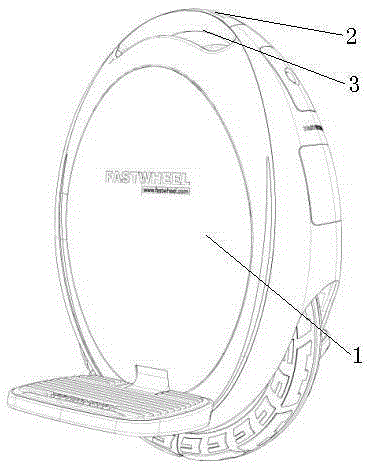
[0028] Embodiment 1: as figure 1 — image 3 , the electric self-balancing unicycle 1 mainly achieves balance through the control processor, attitude sensor and synchronous servo motor (PMSM). Attitude (the actual angle information of the car body), and output the actual angle information to the control processor to compare with the preset given angle to obtain the angle error, and the control processor continuously adjusts the PMSM motor according to the obtained angle error value Direction of rotation and speed; In addition, the control system of the electric self-balancing unicycle 1 also includes a Hall sensor, an acceleration sensor and a touch sensor 3. The Hall sensor is built in the PMSM motor and is used to measure the speed information of the PMSM motor driving the wheels. , the acceleration sensor is used to measure the overall acceleration information generated by the gravitational effect of the earth or the movement of the vehicle for a period of time as a supplem...
Embodiment 2
[0042] Embodiment 2: as image 3 , as an improvement of the present invention, the touch sensor 3 is selected from any one of a capacitive touch sensor, a pressure sensor and a light sensor, and the touch sensor 3 is installed at the lifting handle 2 of the electric self-balancing unicycle 1, It is used to detect whether the user's hand touches the lifting handle 2 and the contact time between the hand and the lifting handle 2 . The rest of the structures and advantages are exactly the same as in Embodiment 1.
Embodiment 3
[0043] Embodiment 3: as figure 1 — image 3 , as an improvement of the present invention, the order of the velocity filtering is the first median filtering and then the moving average filtering. The median filtering can be used to remove the burrs in the velocity data first, so as to ensure the smoothness of the velocity value, and then A moving average filter is used to further improve the smoothness of velocity values. The rest of the structures and advantages are exactly the same as in Embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com