

Method and apparatus for identifying inertial parameters of object to be identified
A technology for identifying targets and inertial parameters, applied in the field of inertial parameter identification devices, can solve problems such as poor generality, low measurement accuracy of angular acceleration signals and torque information, and complex inertial parameter identification process, so as to save fuel and avoid adverse effects. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
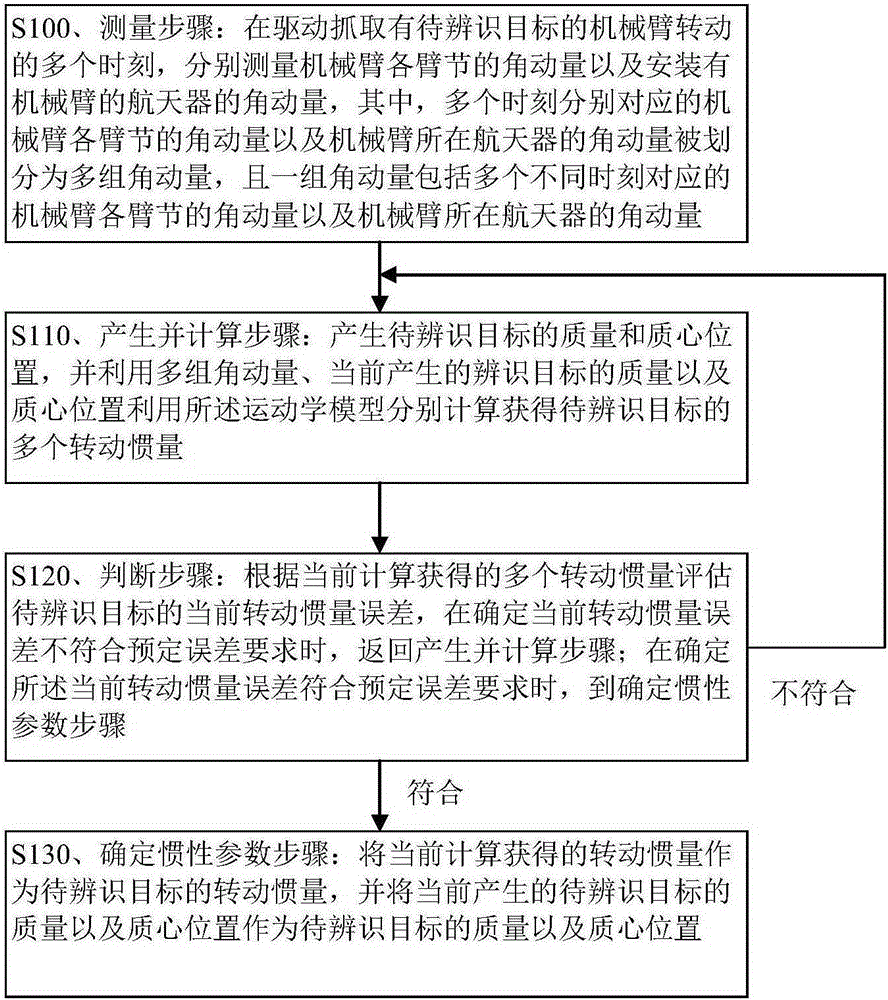
[0031] Embodiment 1. A method for identifying inertial parameters of a target to be identified.
[0032] The method of this embodiment can enable the spacecraft equipped with a robotic arm to effectively identify (for example, on-orbit identification) the inertial parameters of the target to be identified (ie, the unknown target). The inertial parameters of the object to be identified in this embodiment refer to the mass, the position of the center of mass and the moment of inertia of the object to be identified. In this embodiment, the position of the center of mass of the object to be identified is usually the three-dimensional coordinates of the center of mass, that is, the mass and the position of the center of mass of the object to be identified are four scalar quantities.
[0033] A star-arm coupling system is formed between the spacecraft and the mechanical arm in this embodiment. For example, the mechanical arm includes n-1 arm segments (such as an arm segment comprisi...
Embodiment 2
[0116] Embodiment 2, the inertial parameter identification method of the target to be identified.
[0117] First, at multiple moments when the manipulator grabs the target to be identified, the angular momentum of each arm segment of the manipulator and the angular momentum of the spacecraft where the manipulator is located are measured respectively.
[0118] Secondly, the mass and the position of the center of mass of the target to be identified are generated. When the quality and centroid position of the target to be identified is not generated for the first time, the basic genetic algorithm with real-value coding can be used. The implementation process of the basic genetic algorithm can include: assigning fitness based on linear sorting, and selecting with the roulette method, The optimization interval is limited to the conservatively estimated mass and the boundary range of the centroid position, etc. This embodiment does not limit the specific implementation process of t...
Embodiment 3
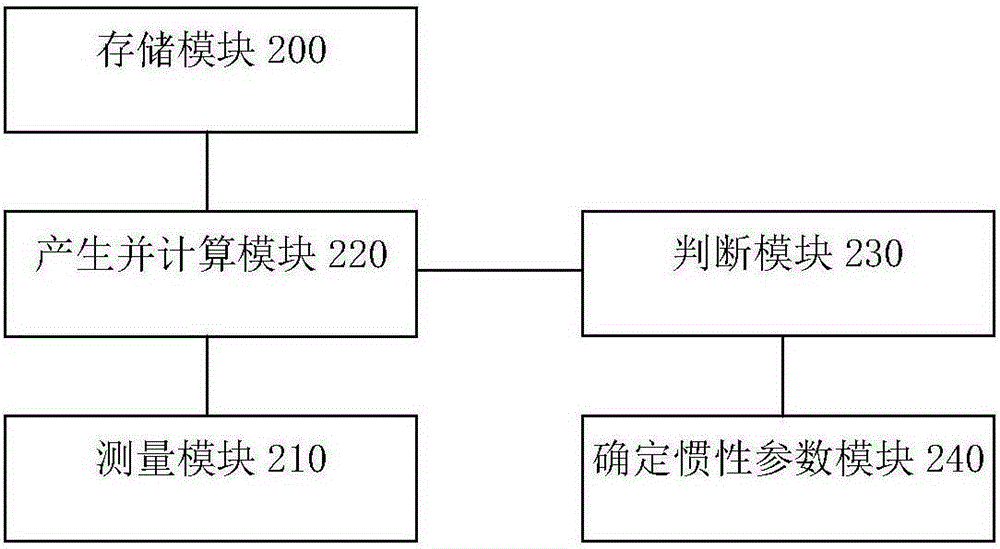
[0128] Embodiment 3: An inertial parameter identification device for a target to be identified. The structure of the device is as figure 2 shown.
[0129] figure 2 Among them, the inertial parameter identification device of the target to be identified in this embodiment mainly includes: a storage module 200 , a measurement module 210 , a generation and calculation module 220 , a judgment module 230 and a determination module 250 of inertial parameters.
[0130] The storage module 200 is mainly adapted to store a kinematics model for solving the moment of inertia of the target to be identified based on the principle of conservation of angular momentum of the multi-rigid body system.
[0131] Specifically, the kinematics model stored in the storage module 200 can be expressed by the following formula:
[0132] A I n ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More