

Swing-type robot arm and obstacle-surmounting method of overhead cable inspection robot
A line inspection robot and overhead cable technology, applied in the field of robotics, can solve problems such as time delay, and achieve the effect of improving load capacity and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
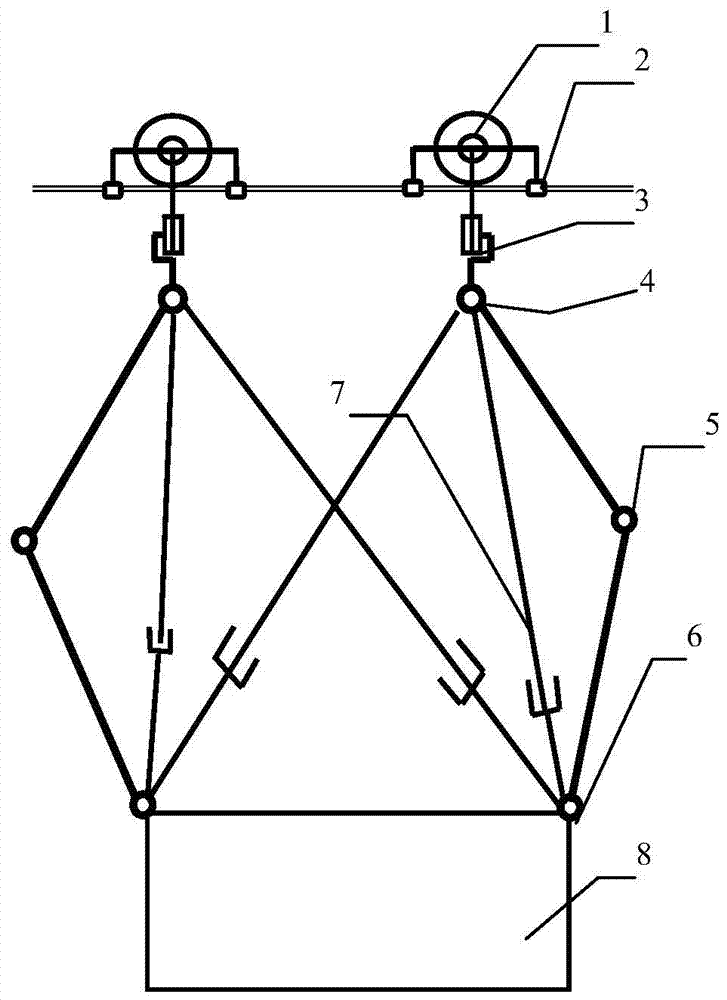
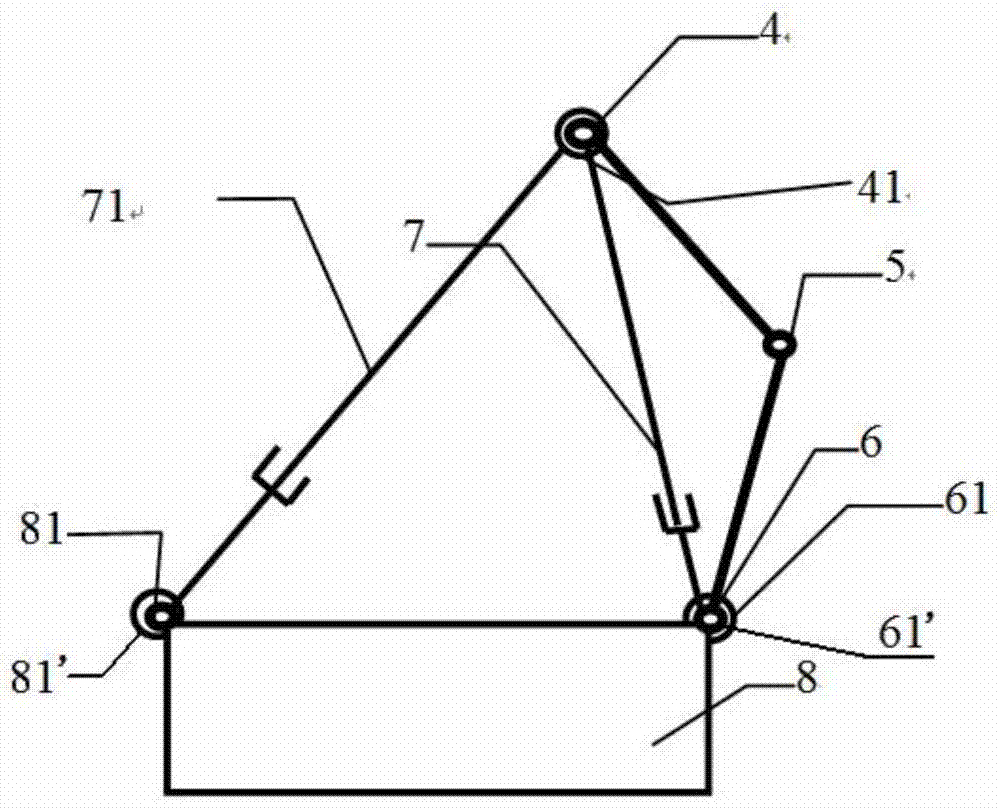
[0079] Such as figure 1 As shown, the overhead cable inspection robot in the present invention is mainly composed of a body 8, a pair of walking mechanisms 1, a pair of robotic arms and a control system. The pair of robotic arms are installed on both ends of the body, and the It can bear weight and can reach forward and grasp (relying on a pair of knuckles), and the control system can drive the walking mechanism and the robot arm to complete command actions (such as moving forward, stopping, fast threading and off-line, etc.); Comprise a horizontal rotation joint 3, a wrist joint 4, an elbow joint 5 and a shoulder joint 6 in each robot arm of the present invention, the main inventive point of the present invention is: be connected with flexible cable between each wrist joint and body two ends.
[0080] see figure 1 and figure 2 A fixed pulley 41 is provided at each wrist joint 4 of the swinging robot arm of the overhead cable inspection robot of the present invention; a pai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More