

Robust sliding mode observation method and robust sliding mode observer for lifting deflection angle of crane
A crane and declination technology, applied in the directions of transportation and packaging, load hanging components, etc., can solve problems such as the dynamic response error of state variables, and achieve the effect of enhanced robustness, good effect and reliable performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
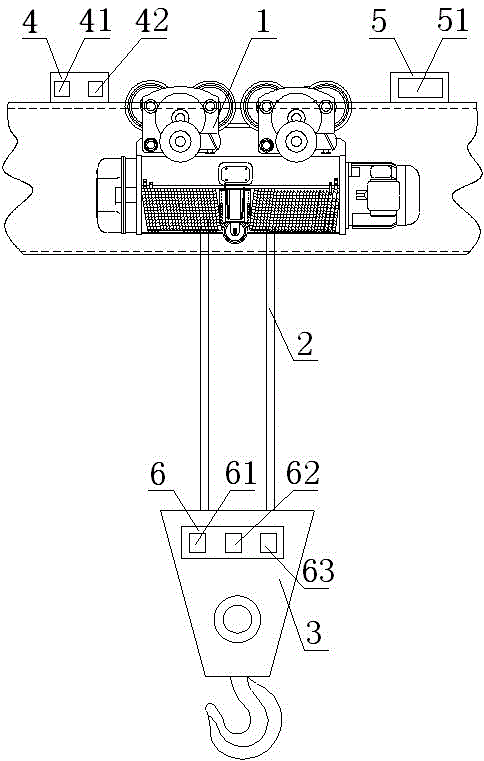
[0028] Such as figure 1 As shown, a robust sliding mode observation method of crane hoisting deflection angle, which includes the following steps:
[0029] (1) Set a speed sensor 41, an acceleration sensor 42 and a controller 51 on the electric hoist 1, and set an angle sensor 61, an angular velocity sensor 62 and a hoisting load sensor 63 on the pulley block 3;
[0030] (2) The controller 51 summarizes the data measured by the speed sensor 41, the acceleration sensor 42, the angle sensor 61, the angular velocity sensor 62 and the hoisting sensor 63 and performs matrix calculations to gradually estimate the system state variables and obtain the hoisting weight of the crane. Angle value.
[0031] The present invention also provides a robust sliding mode observer for crane hoisting deflection, which includes an electric hoist 1, the bottom of the electric hoist 1 is connected with a pulley block 3 through a wire rope 2, and the top of the electric hoist 1 is respectively set T...
Embodiment 2
[0034] Such as figure 1 As shown, a robust sliding mode observation method of crane hoisting deflection angle, which includes the following steps:
[0035] (1) Set a speed sensor 41, an acceleration sensor 42 and a controller 51 on the electric hoist 1, and set an angle sensor 61, an angular velocity sensor 62 and a hoisting load sensor 63 on the pulley block 3;
[0036] (2) The controller 51 summarizes the data measured by the speed sensor 41, the acceleration sensor 42, the angle sensor 61, the angular velocity sensor 62 and the hoisting sensor 63 and performs matrix calculations to gradually estimate the system state variables and obtain the hoisting weight of the crane. Angle value.
[0037] As an optimization of the above technical solution, the step (2) further includes:
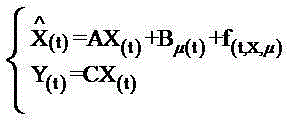
[0038] (21) The uncertain nonlinear dynamical system of crane hoisting weight is:
[0039]
[0040] Among them, the state variable , is the electric hoist position (m), is the electric hois...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More