Wearable gesture control device for controlling movement of robot in human-computer collaborative remanufacturing
A technology of robot motion and human-machine collaboration, applied in computer control, program control, general control system, etc., can solve problems such as poor robot control performance, achieve low cost, improve control performance, and solve the effects of cumbersome processes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
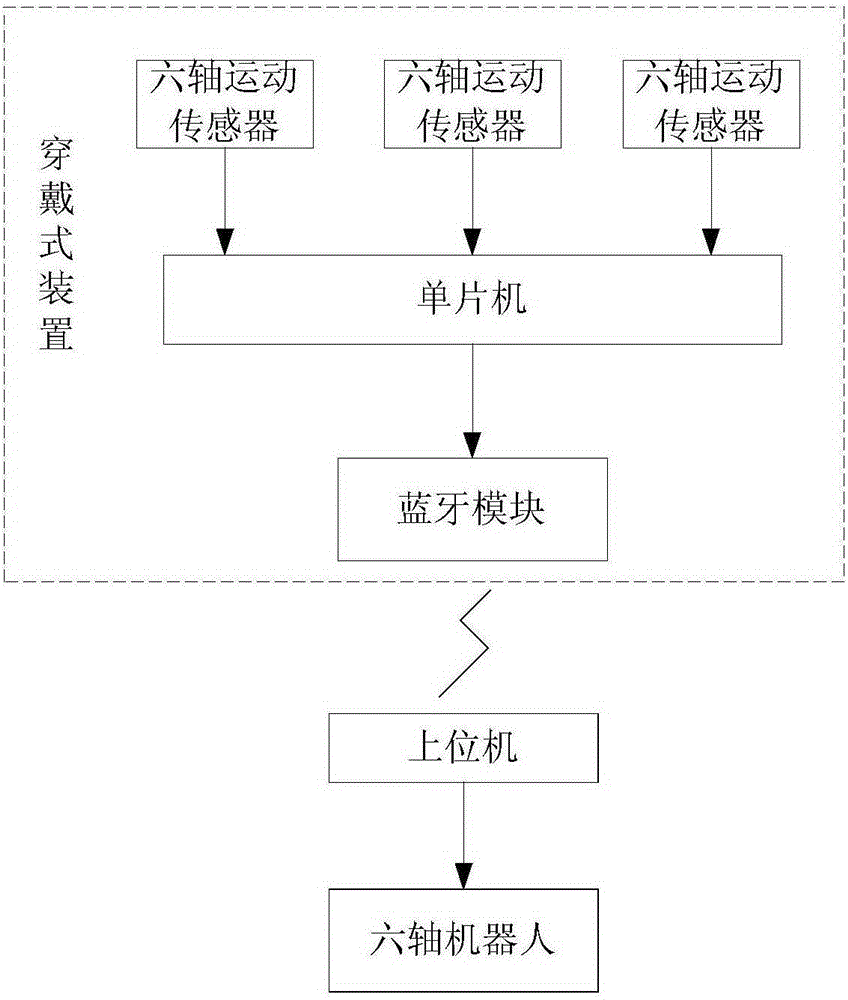
[0026] combine figure 1 Describe this embodiment, the wearable gesture control device for controlling the movement of the robot in the human-machine collaborative remanufacturing described in this embodiment, the control device includes a wearable device and a host computer;
[0027] The wearable device includes a microcontroller and three six-axis motion sensors;
[0028] Three six-axis motion sensors are installed on the operator's fingers to obtain angular velocity and acceleration information;
[0029] The six-axis motion sensor in this embodiment is realized by the chip MPU-6050, which integrates a 3-axis MEMS gyroscope and a 3-axis MEMS accelerometer, and an expandable digital motion processor DMP (Digital Motion Processor). Third-party digital sensors, such as magnetometers. After expansion, a 6-axis signal can be output through its I2C or SPI interface. MPU-60X0 can also connect non-inertial digital sensors, such as pressure sensors, through its I2C interface. The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More