

Method for tracking and controlling locus of unmanned bicycle
A trajectory tracking and control method technology, which is applied in vehicle position/route/height control, non-electric variable control, position/direction control, etc., can solve the influence of bicycle trajectory, cannot obtain the best effect, cannot obtain tracking effect, etc. problem, the effect of achieving good results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] A trajectory tracking control method for an unmanned bicycle proposed by the present invention will be described in detail below in conjunction with the accompanying drawings.
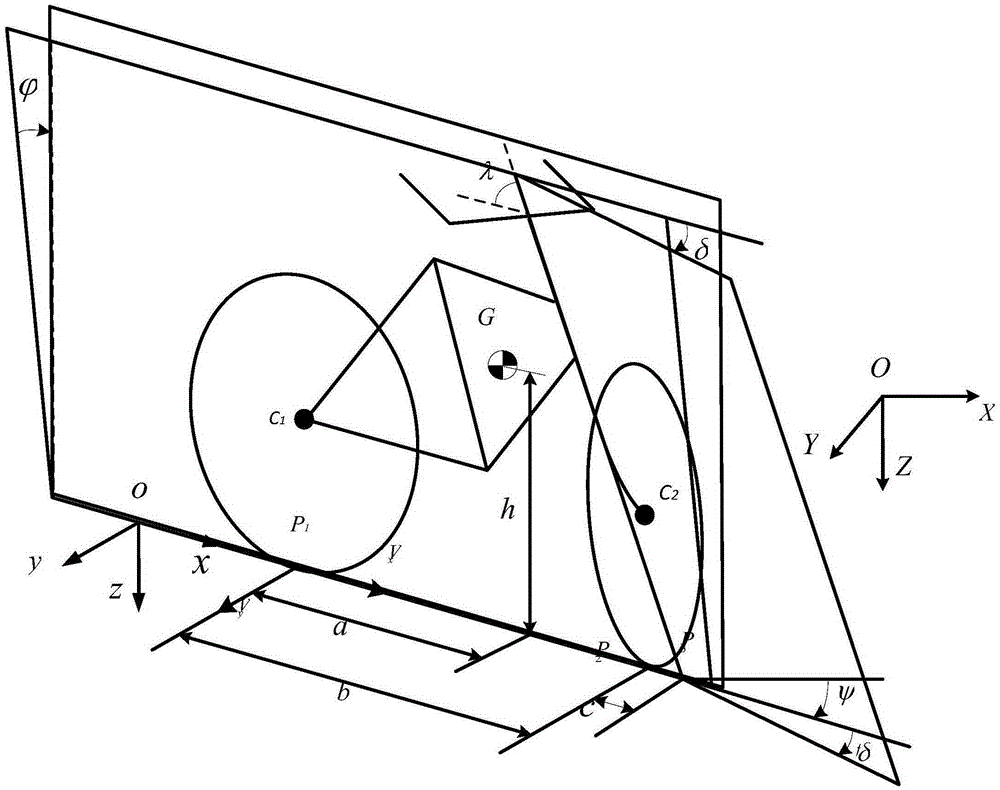
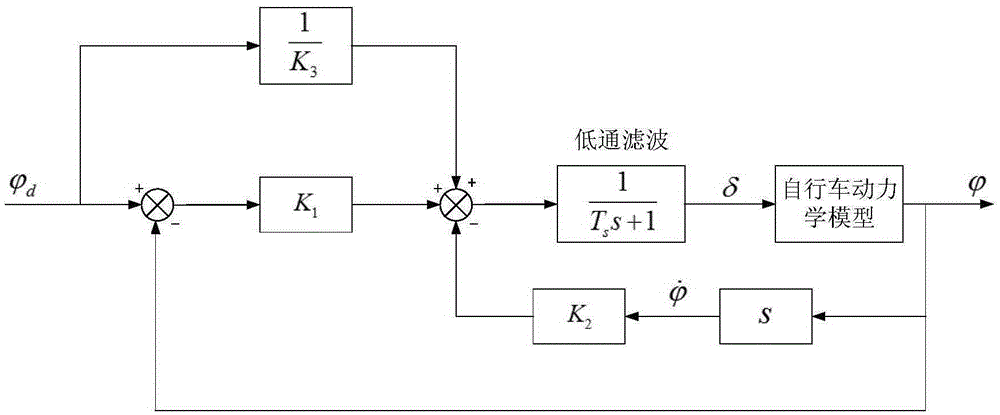
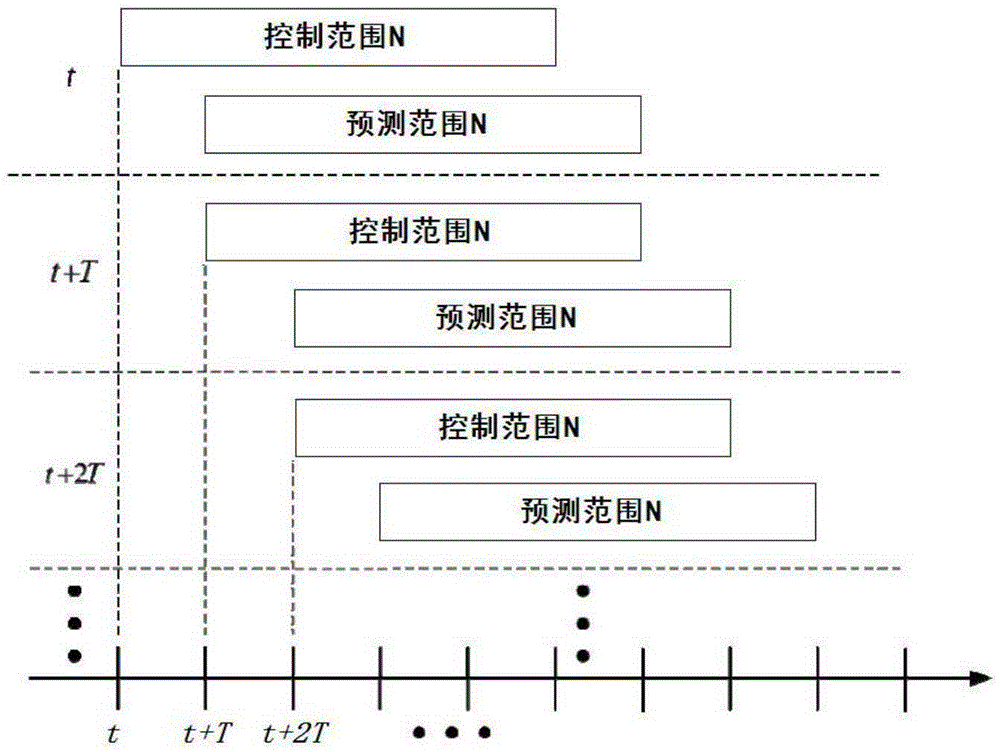
[0070] The invention implements the trajectory tracking control of the bicycle through a model predictive control algorithm. First, for the bicycle, establish its balance dynamics model, and establish the system state equation after adding the self-balancing controller; secondly, establish the kinematics model of the bicycle, and perform linearization; then combine the kinematics model with the self-balancing control system Combined with the corresponding simplified processing, a seven-dimensional state prediction model is established; finally, the linear quadratic index function is selected, its weight matrix parameters are set, and the optimal control input at each sampling time is solved online. Figure 8 It is a flow chart of the trajectory tracking control method of the unmanned bicycle of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More