

Multi-degree-of-freedom mechanical arm based on steel wire transmission
A manipulator and degree-of-freedom technology, applied in the field of manipulators, can solve the problems of increasing equipment weight, inaccurate positioning of mechanical fingers, unsightly manipulator mechanism, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
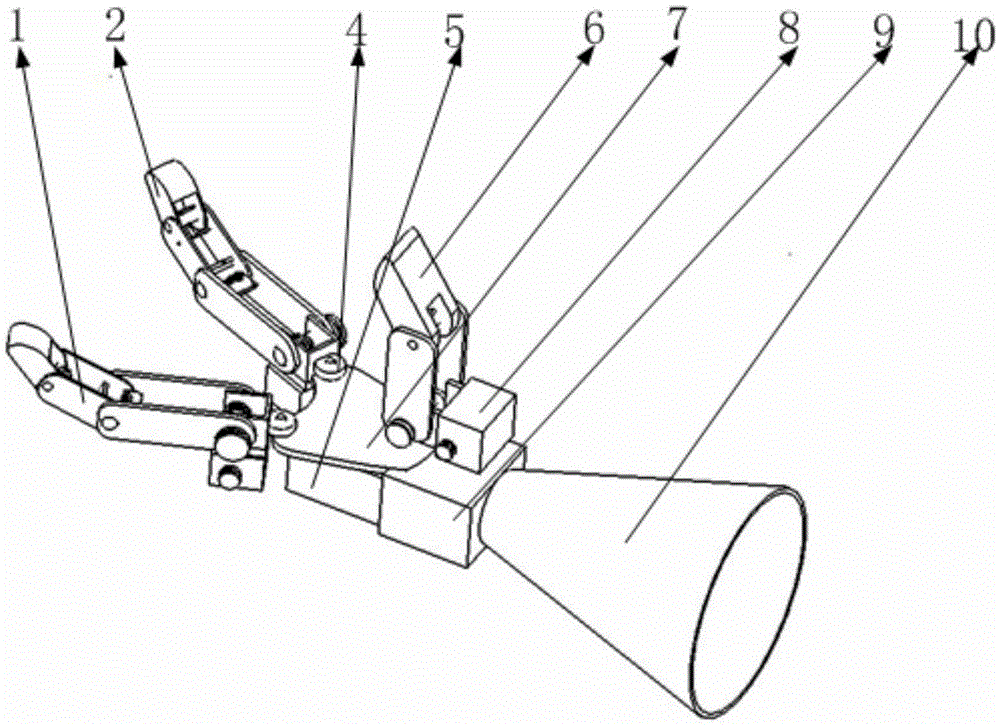
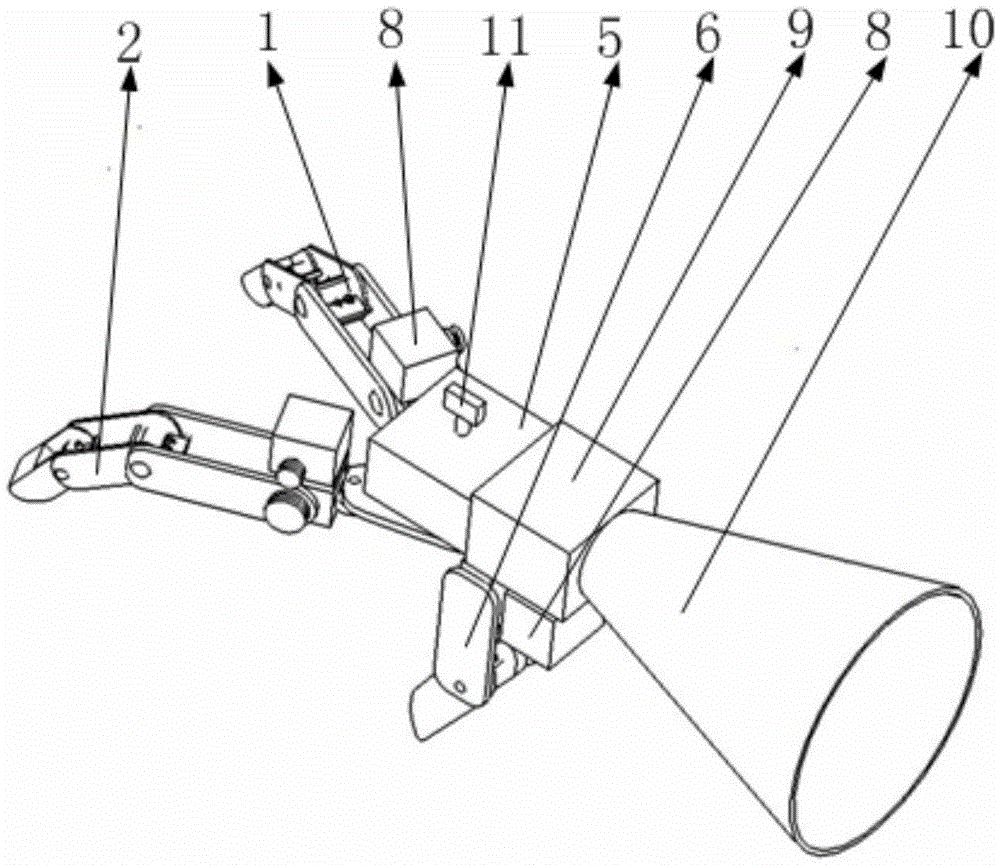
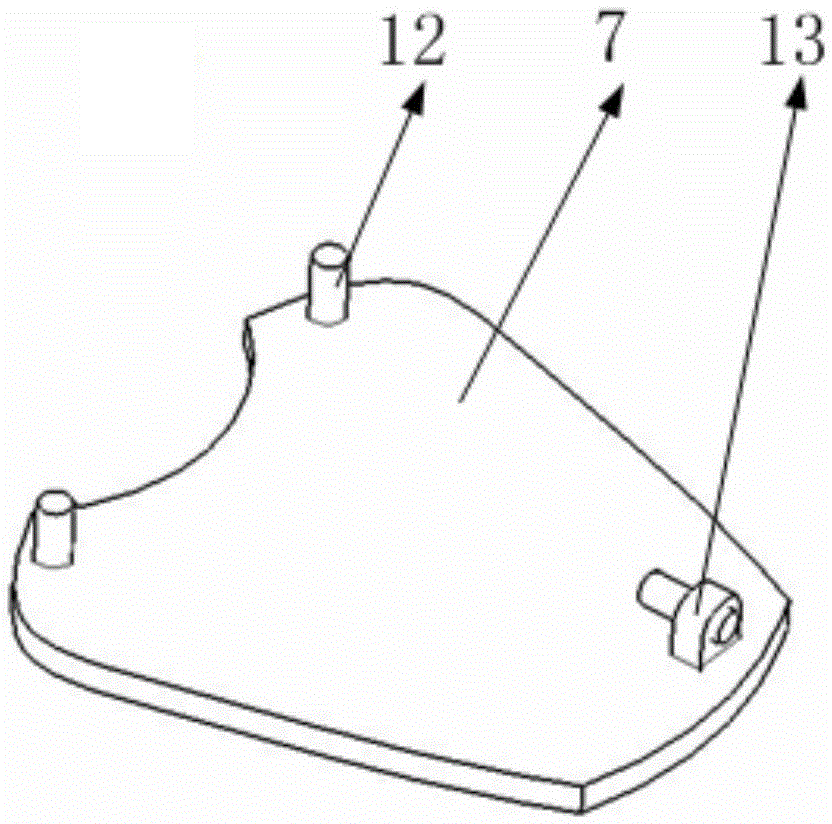
[0044] Such as figure 1 , 2 As shown, it includes the second sub-finger, the first sub-finger, the fixed pendulum block of the sub-finger, an independent power supply, the main finger, the finger support plate, the fixed structure of the manipulator, the fixed sleeve of the manipulator, the finger force adjustment knob, the swing shaft of the sub-finger, the main Refers to the fixed pendulum block, the main finger fixed pendulum block support, of which such as image 3 As shown, the two secondary finger swing shafts are installed at both ends of one side of the finger support plate, as shown in figure 1 As shown, the first and second subfingers are respectively installed on the two subfinger swing shafts through the fixed pendulum block of the secondary finger, the fixed pendulum block of the main finger is supported and installed on the finger support plate, and the fixed pendulum block of the main finger passes through the rotating shaft Installed on the fixed pendulum sup...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More