

A Variable Stiffness Joint Based on Torsion Spring Characteristics
A technology of variable stiffness and torsion spring, applied in the field of variable stiffness joints based on the characteristics of torsion springs, it can solve the problems of many parts, difficult to guarantee variable stiffness performance, and small variable stiffness range, so as to achieve good constant stiffness performance and adjust stiffness loss. low effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
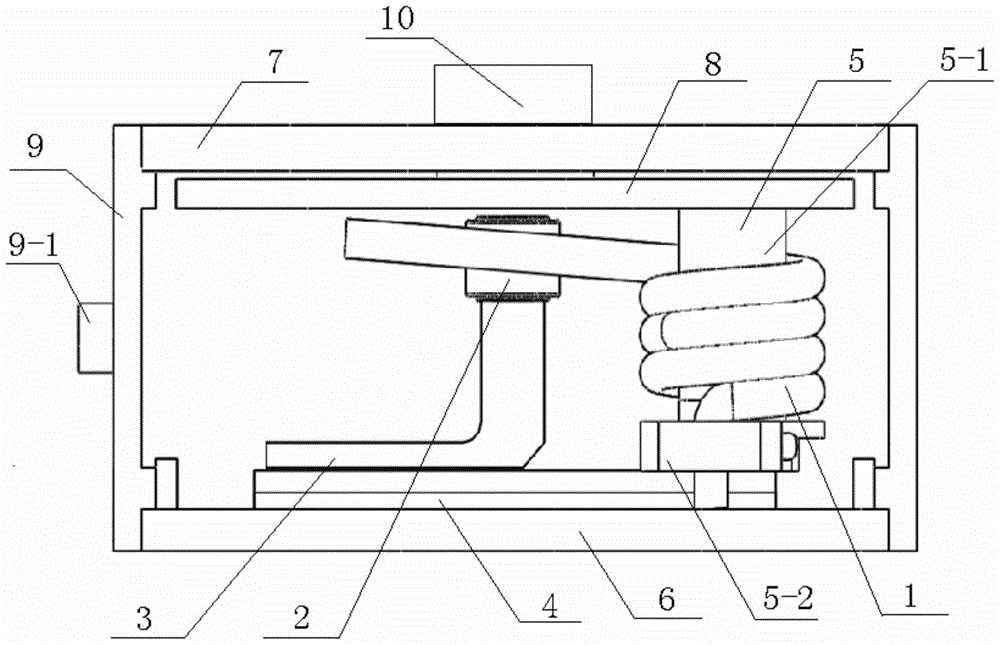
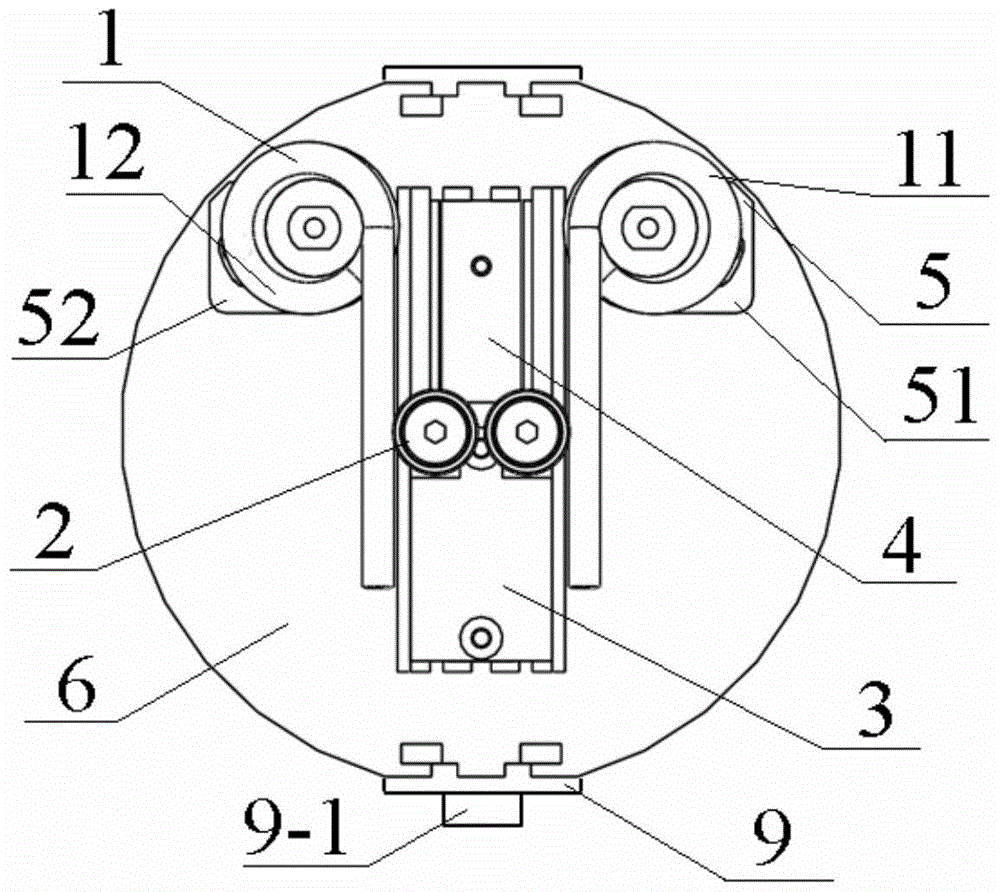
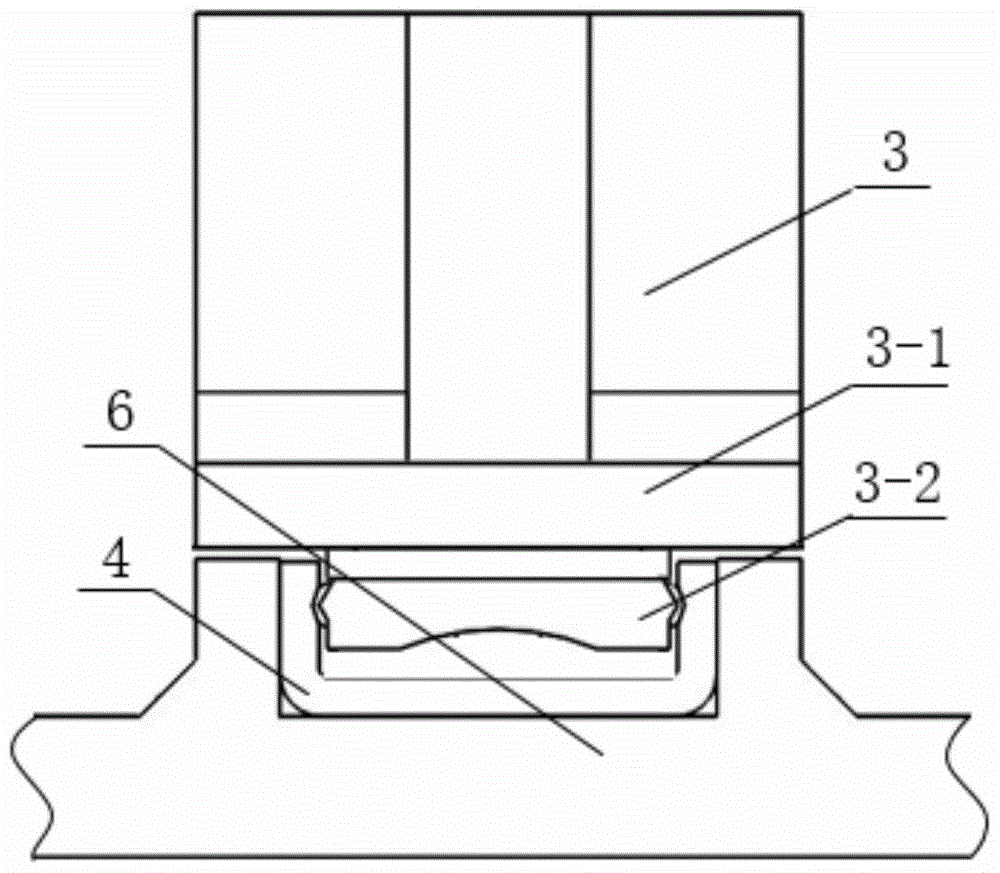
[0012] Specific implementation mode one: combine Figure 1-Figure 5 This embodiment is described. A variable stiffness joint based on torsion spring characteristics in this embodiment includes a set of torsion springs 1, sliders 3, slide rails 4, a first output disc 6, a second output disc 7, an input Disk 8, input disk shaft 10, two rollers 2, a set of torsion spring brackets 5 and two connectors 9, a set of torsion springs 1 includes a first torsion spring 11 and a second torsion spring 12, a set of torsion spring brackets 5 includes a first torsion spring bracket 51 and a second torsion spring bracket 52; the first output disk 6, the second output disk 7 and the input disk 8 are all discs, and the first output disk 6 and the second output disk 7 are arranged oppositely, The first output disk 6 and the second output disk 7 are fixedly connected by two connectors 9, and the two connectors 9 are arranged symmetrically, the input disk rotating shaft 10 is inserted on the second...
specific Embodiment approach 2
[0013] Specific implementation mode two: combination figure 1 and figure 2 Describe this embodiment, the variable stiffness joint based on torsion spring characteristics in this embodiment, the first torsion spring 11 and the second torsion spring 12 have the same structure, and the first torsion spring 11 and the second torsion spring 12 The direction of rotation is opposite, the first torsion spring 11 and the second torsion spring 12 are axisymmetrically arranged on both sides of the slide rail 4, and the first torsion spring bracket 51 and the second torsion spring bracket 52 are symmetrically arranged on both sides of the slide rail 4 , the others are the same as in the first embodiment.
specific Embodiment approach 3
[0014] Specific implementation mode three: combination figure 1 and figure 2 This embodiment is described. In this embodiment, a variable stiffness joint based on torsion spring characteristics is described. One of the two connectors 9 is processed with an output rod installation interface end 9-1. Others and specific implementation Method 1 is the same.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More