

X-Y both-way unmanned remote control climbing robot
A robot and two-way technology, applied in the field of mechanical equipment, can solve the problems of complex robot structure, unsuitable robot, inconvenient operation, etc., to achieve the effect of simple structure, guaranteed climbing stability, and strong market competitiveness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
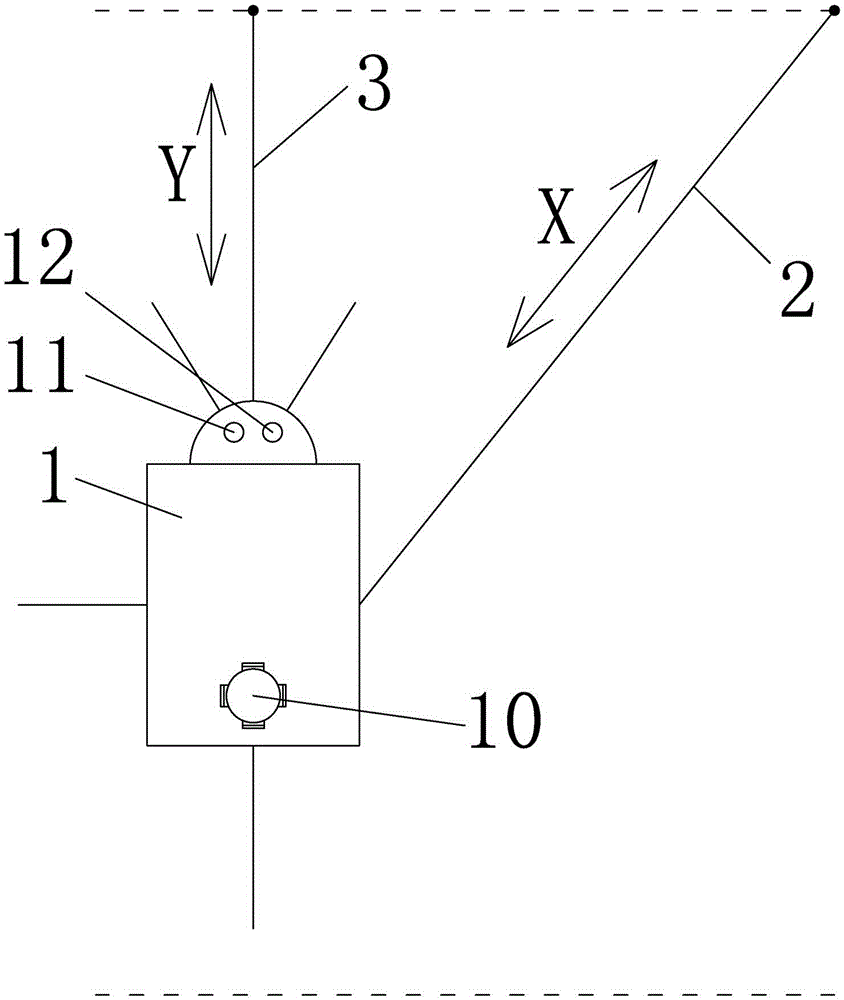
[0019] The present invention will be specifically and further described below in conjunction with the accompanying drawings. An X-Y two-way unmanned remote control climbing robot is characterized in that it includes a host 1 and a climbing device and a rescue device disposed therein:
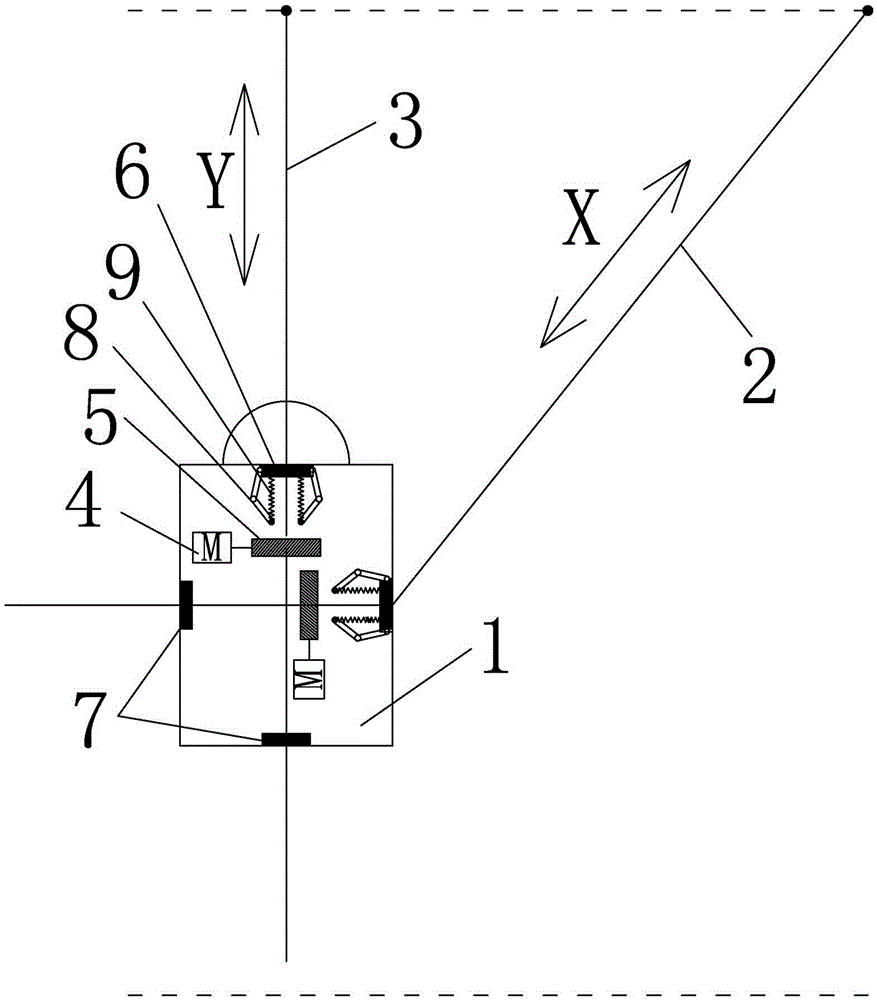
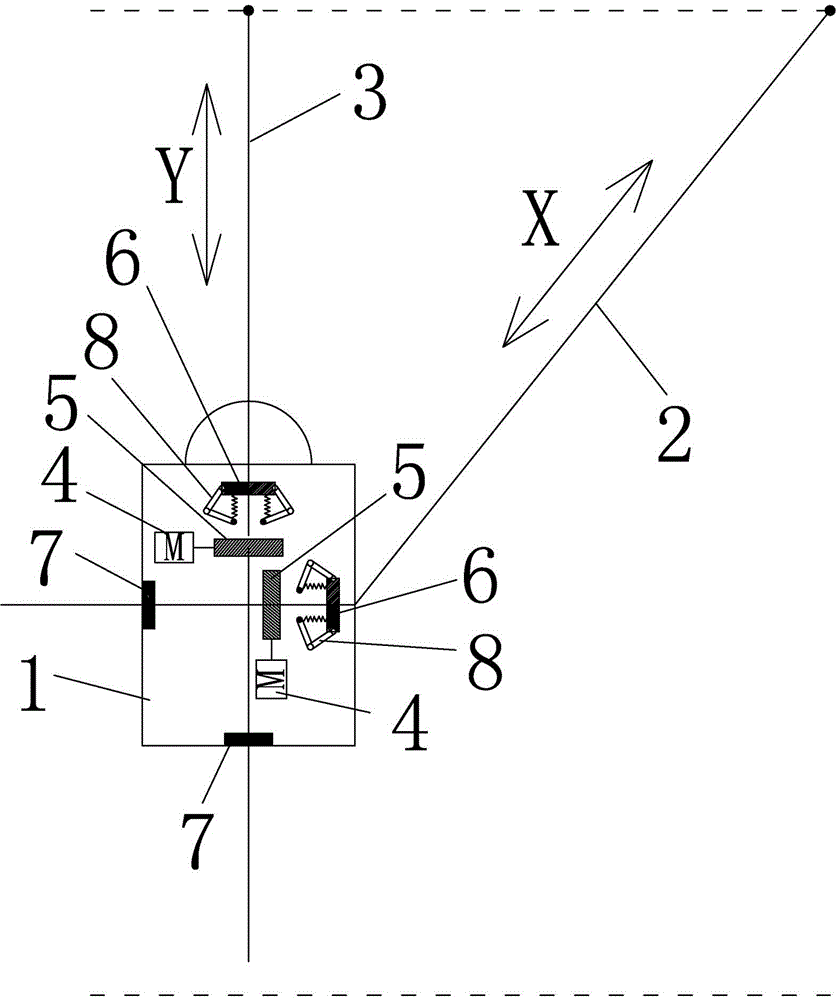
[0020] The climbing device described therein includes X-axis steel wire 2 ropes and Y-axis steel wire rope 3 fixed on the top, and the above-mentioned two-axis steel wire ropes are respectively connected with corresponding winding devices and electromagnet clamping devices in the main engine, and the winding device It is the drum 5 driven by the motor 4, the wire rope is wound on the drum 5, and when the drum 5 rotates, it can drive the main machine 1 to move in the corresponding direction;
[0021] Described electromagnet clamping device comprises active electromagnet 6 and driven electromagnet 7, and active electromagnet 6 is positioned at the entrance of steel wire rope, and driven electromag...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More