

Multi-unmanned aerial vehicle cooperation highway intelligent inspection system
A highway and intelligent inspection technology, applied in traffic flow detection, three-dimensional position/channel control, etc., can solve problems such as cumbersome charging process, inability to realize autonomous flight, and flight range limitation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be described in further detail below in conjunction with the accompanying drawings.
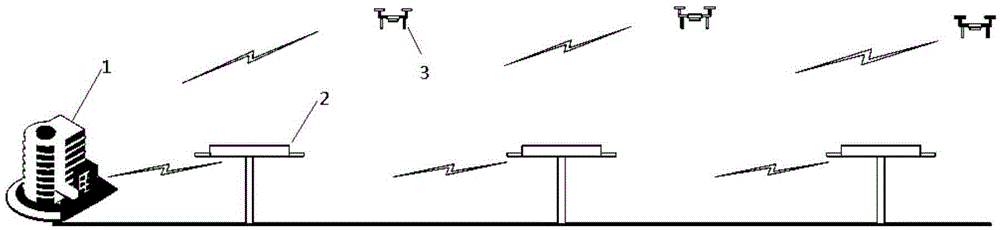
[0029] The present invention provides a multi-unmanned aerial vehicle 3 collaborative highway intelligent inspection system, including a ground control station 1, a ground transfer station 2 and a drone 3, such as figure 1 shown.
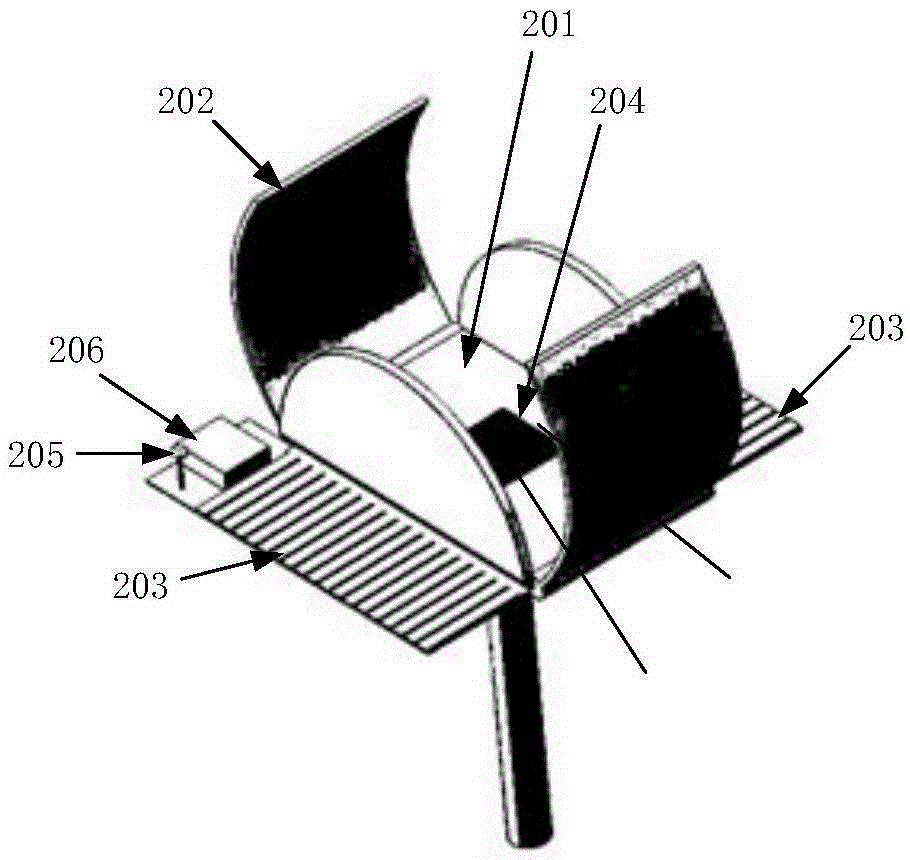
[0030] The ground transfer station 2 includes a UAV landing platform 201, a ground transfer station protection device 202, a solar panel 203, a color recognition area 204, a wireless charging transmitter 205, a ground transfer station controller 206, and a wireless communication module A207, such as figure 2 shown. Among them, the UAV landing platform 201 is used for parking the UAV 3; the ground transfer station protection device 202 is two blades that can be turned over automatically, controlled by the ground transfer station controller 206; When the UAV 3 is ready to take off, the blades in the ground transfer station protect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More