

Force/position switching control method of joints of single leg of hydraulic four-leg robot
A technology of quadruped robot and control method, which is applied in the field of single-leg joint force/position switching control of hydraulic quadruped robot, to achieve stable force control, weaken jitter, and ensure smooth transition of switching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described in detail below in combination with specific embodiments.
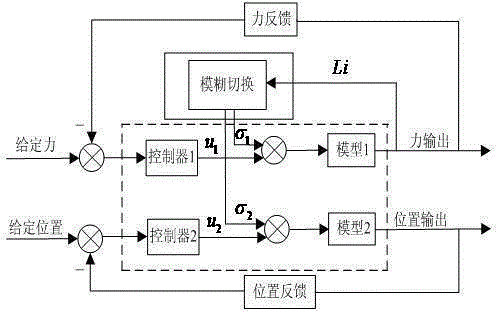
[0039] The present invention is a single-leg joint force / position switching control method of a hydraulic quadruped robot, such as figure 1 Shown, including the multi-model control module (dotted box) and the fuzzy control module (solid box).
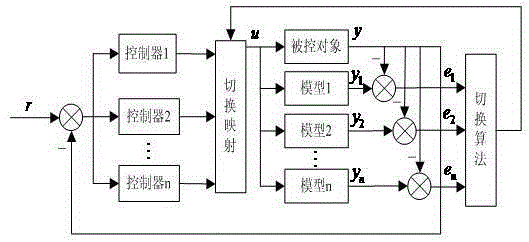
[0040] The multi-model control module such as figure 2 shown, including multi-model sets, multi-controller sets, and switching principles.
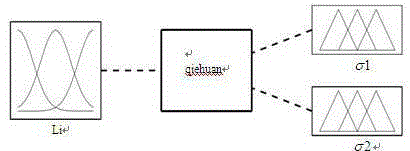
[0041] Described fuzzy control module comprises three links of fuzzification, fuzzy reasoning and defuzzification; corresponding fuzzy switching control module is as image 3 As shown, it has one input and two outputs, the input is the force Li detected by the robot joint force sensor, and the output is the control weight , .
[0042] In order to achieve the purpose of precise positioning, when the foot of the robot is not in contact with the ground, the joint position control ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More