

Unmanned plane three-dimensional flight track precision detection method and system
A technology of track accuracy and detection method, which is applied in the field of detection method and system of UAV flight three-dimensional track accuracy, which can solve the problem of inability to obtain UAV flight three-dimensional track accuracy, inability to detect UAV actual flight track, etc. problem, to achieve the effect of ensuring comparability, realizing high-precision positioning, and solving the large amount of data collection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
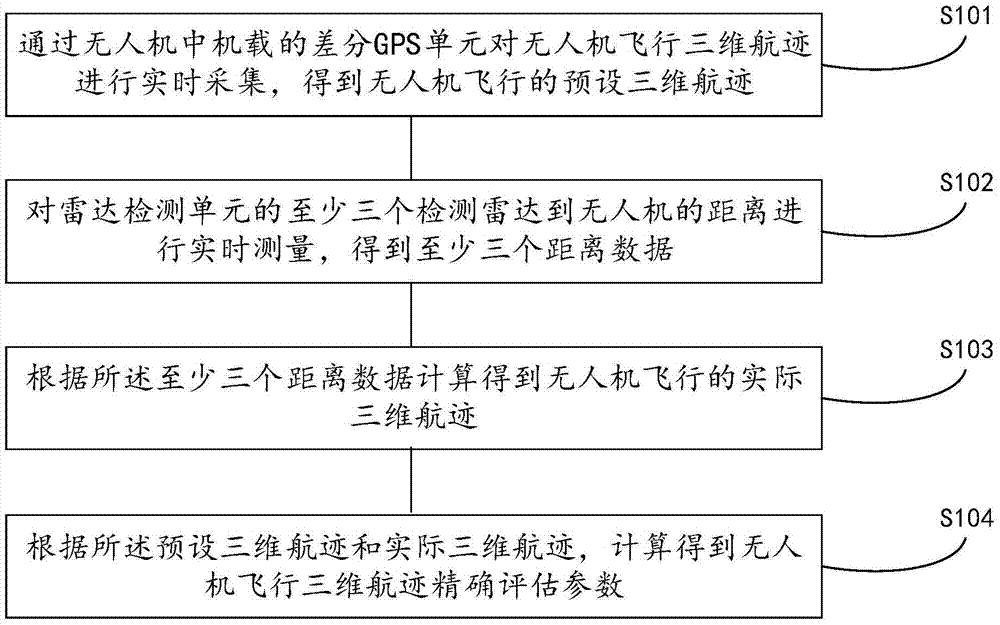
[0067] refer to figure 1 The schematic flow chart of the three-dimensional track accuracy detection method for unmanned aerial vehicles shown, the specific steps of the present invention are implemented as follows:
[0068] In step S101, the differential GPS unit on board the UAV is used to collect the three-dimensional flight track of the UAV in real time to obtain a preset three-dimensional flight track of the UAV;
[0069] The differential GPS unit is set in the on-board equipment of the UAV. During the flight of the UAV, the first intelligent control unit in the on-board equipment controls the UAV to fly according to the preset track. The three-dimensional flight track of the flight is collected in real time.
[0070] In this step, in order to ensure the one-to-one correspondence between the acquisition time and the three-dimensional track, the first timing unit can also be set in the airborne equipment, and the first intelligent control unit controls the first timing uni...
Embodiment 2
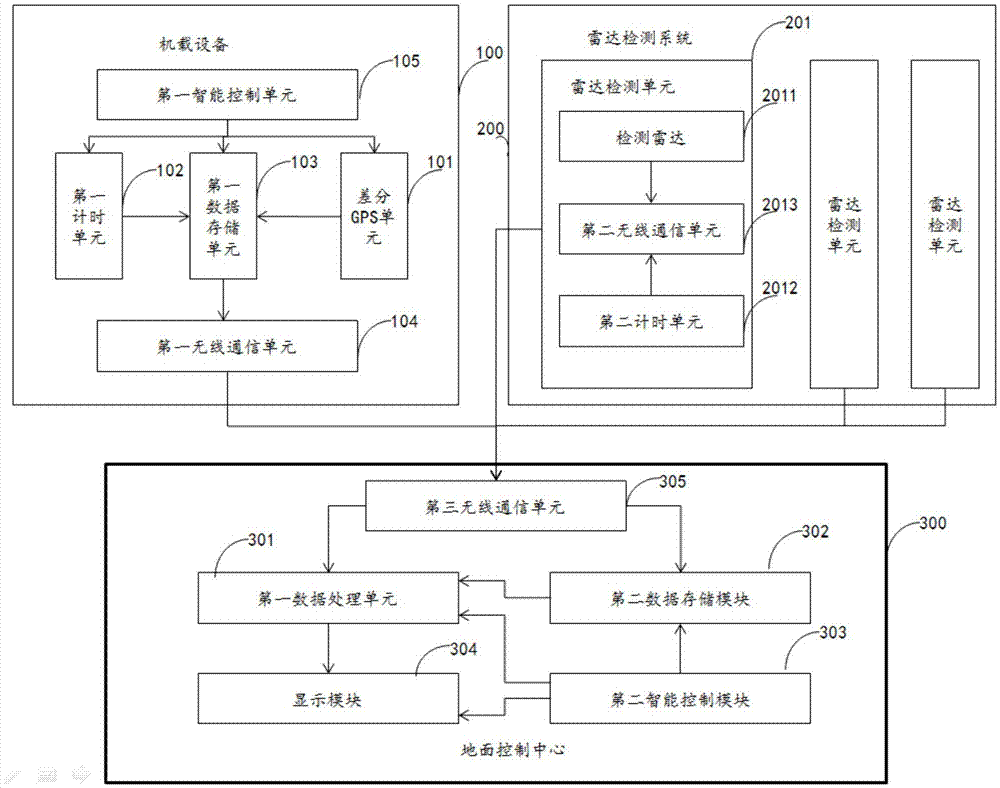
[0100] Corresponding to the method provided in Embodiment 1, this embodiment provides a three-dimensional track accuracy detection system for UAV flight, such as figure 2 The system architecture diagram shown, the system includes the following modules:
[0101] The differential GPS unit 101 is arranged in the on-board device 100 of the UAV, and is used to collect the three-dimensional flight track of the UAV in real time, so as to obtain the preset three-dimensional flight track of the UAV flight;
[0102] The radar detection unit 201 is arranged in the radar detection system 200, the radar detection system 200 includes at least three radar detection units, each radar detection unit includes at least one detection radar 2011, and the detection radar 2011 is used to detect The distance between man and machine is measured in real time, and at least three distance data are obtained;
[0103] According to the size of the monitoring area of the UAV, more radar detection units c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More