

Three-finger mechanical paw
A technology of mechanical claws and fingers, which is applied in the field of robotics, can solve the problems of being unable to adapt to a wide range of sizes of grasped objects, being unable to adapt to grasped objects of various shapes, and complex structure of mechanical claws, achieving small space occupation, simple structure, and wide range of motion. big effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
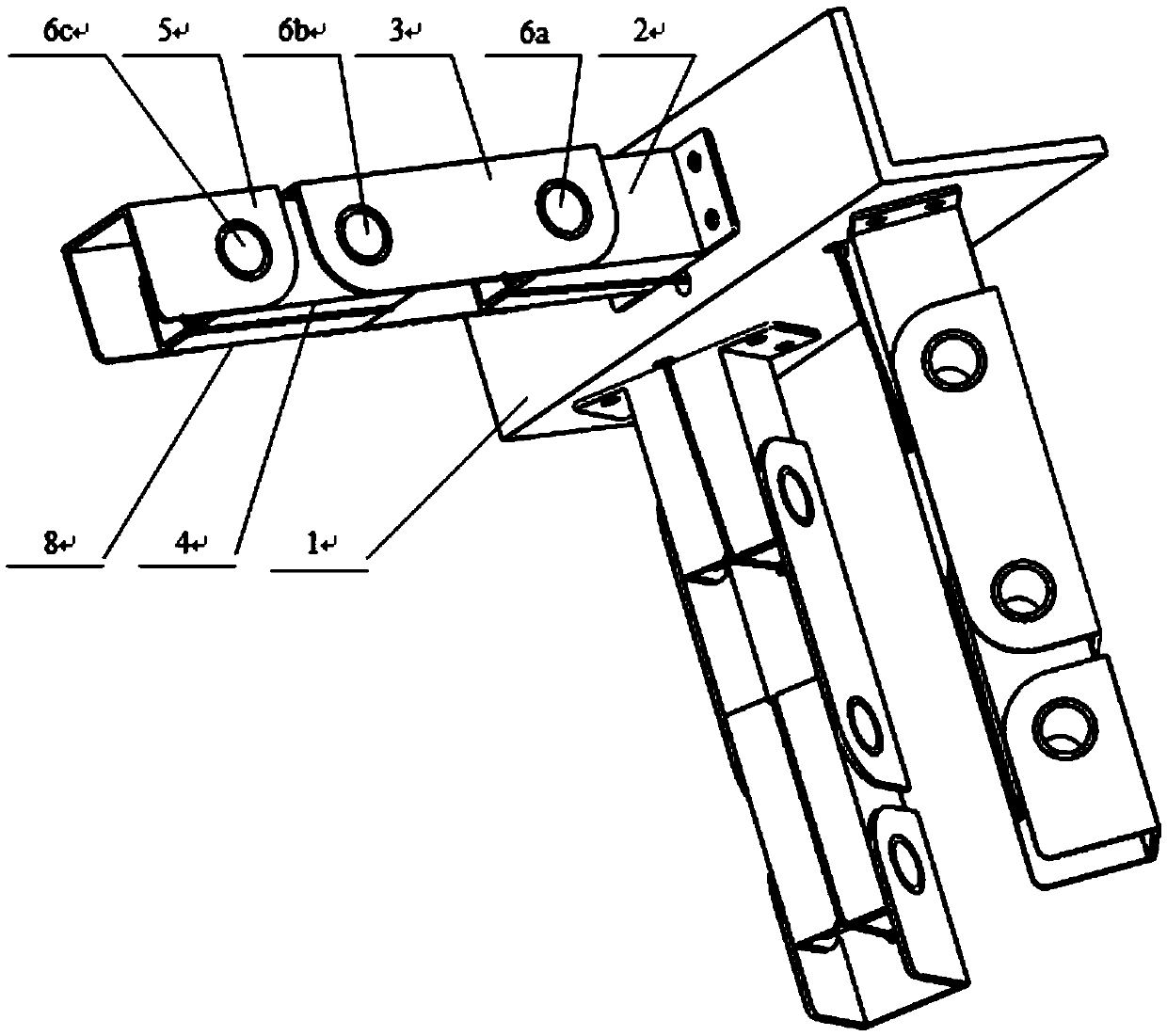
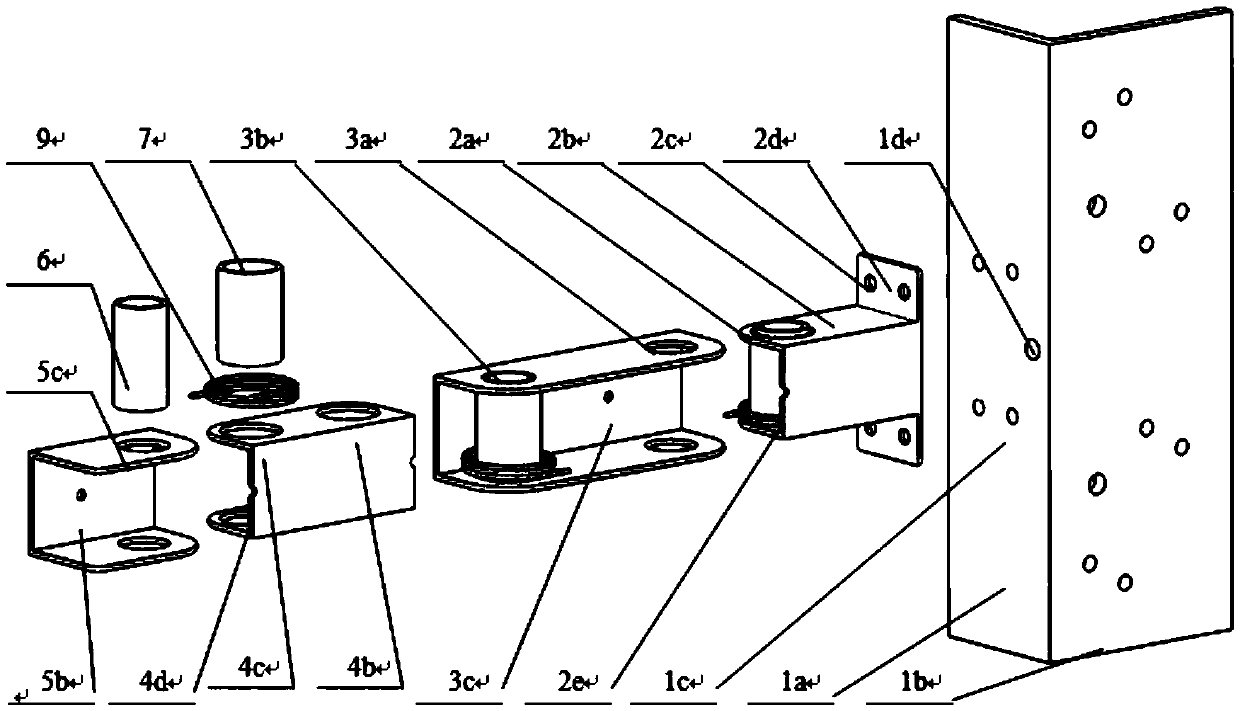
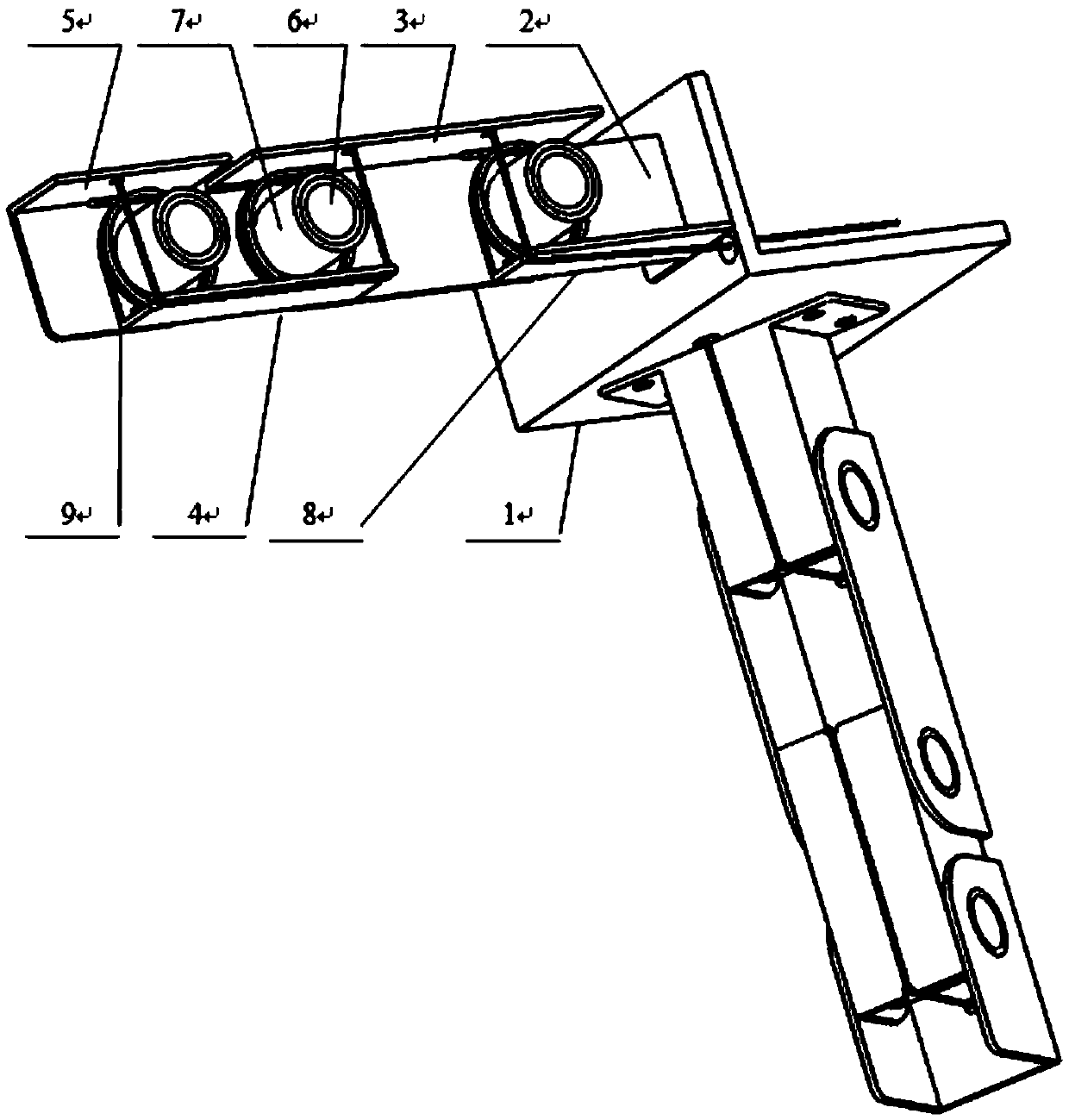
[0021] Such as figure 1 , figure 2 and image 3 As shown, the three-finger mechanical gripper is characterized in that it includes a palm base 1 and a finger; wherein the finger includes a finger base 2, knuckle one 3, knuckle two 4, knuckle three 5, pin shaft 6, shaft sleeve 7, flexible Rope 8, spring 9; Among them, the palm base 1 has side one 1a and side two 1b perpendicular to each other, and there are 3 groups of mounting holes 1c on both sides; 3 fingers are fixed and installed on the palm base 1 with screws 10 through the finger base 2 , one finger is installed on the side 1a of the palm base, and the other 2 fingers are installed on the side 2 1b of the palm base, and the two fingers set on the side 2 1b of the palm base are non-parallel settings, after the two fingers are bent The projection on this side is in the shape of a "eight"; the 3 fingers have the same composition and structure, as described below. The finger base 2 is made up of an end plate 2d and a U-s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More