

Combined navigation method for underwater vehicle based on individual seabed transponder
An underwater vehicle and integrated navigation technology, which is applied in the direction of navigation, navigation, surveying and navigation through speed/acceleration measurement, can solve the problems of limited navigation area, complex project implementation, high risk, and low efficiency, and achieve The effect of improving navigation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0027] As in 1, figure 2 As shown, the specific implementation process of the underwater vehicle integrated navigation method based on a single seabed transponder described in this embodiment is as follows:
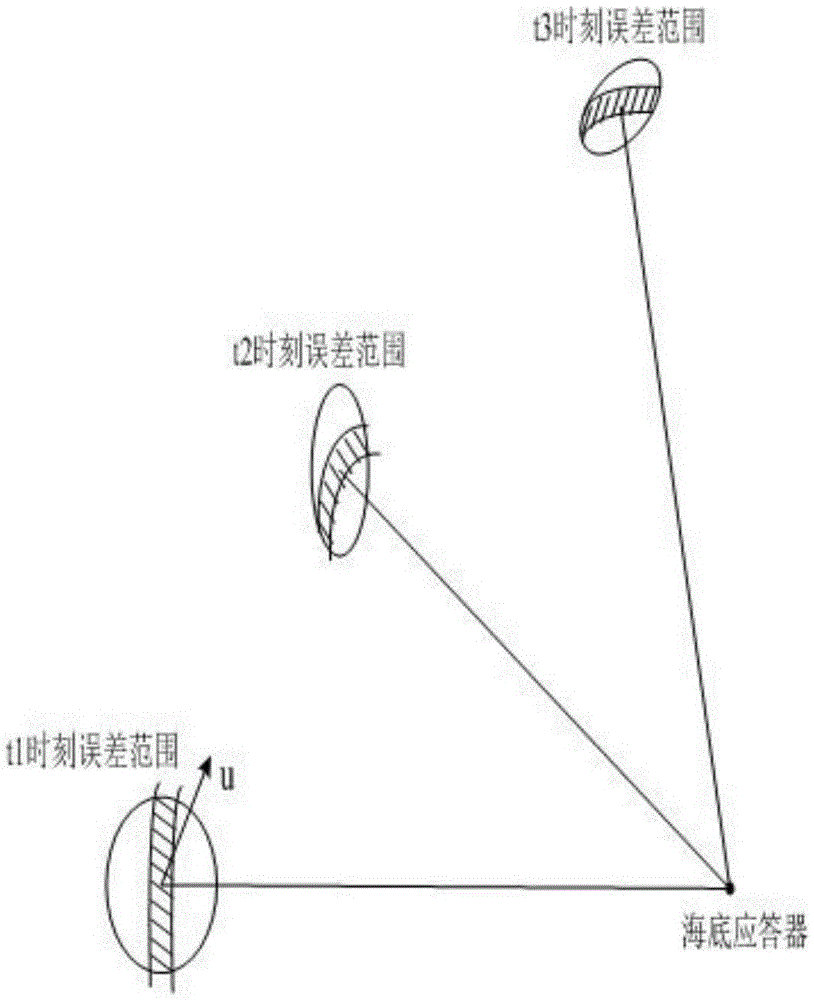
[0028] 1. Deploy a submarine transponder in the sea area and measure its exact position. The operating range of the submarine transponder is 6km, thus forming a spherical coverage area with the transponder as the center and a radius of 6km for the underwater vehicle;
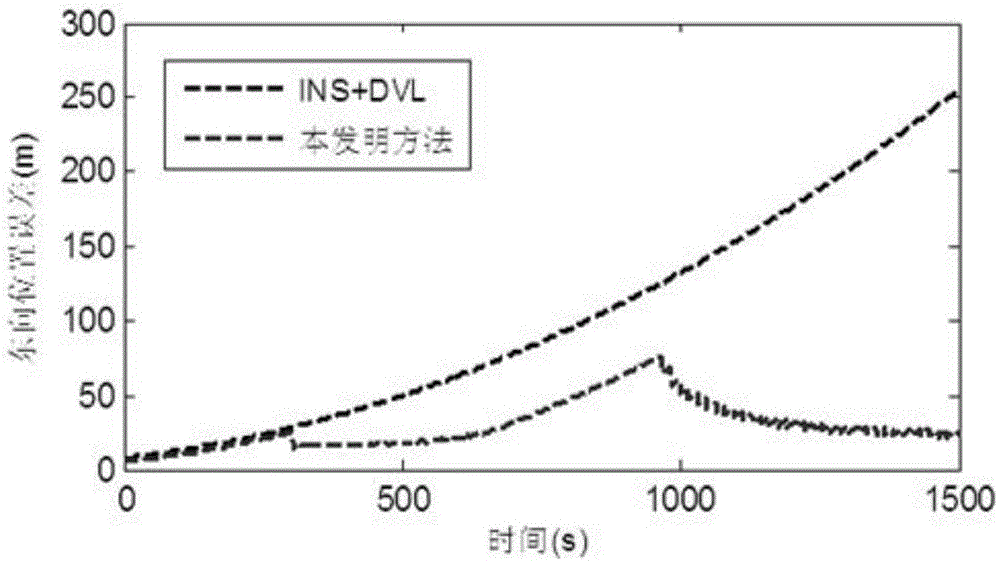
[0029] 2. The aircraft transmits an inquiry pulse at a period of 8s. When the aircraft enters the effective coverage area of the transponder, the transponder generates a response signal after receiving the interrogation pulse, and the aircraft performs fusion based on the response signal and its own integrated navigation measurement results, thereby Improve navigation accuracy.
[0030] The following is a detailed introduction to the calculation process of the underwater vehicle integrated navigation m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More