

Pose solving method based on wireless positioning and laser map matching
A wireless positioning and map matching technology, applied in directions such as road network navigators, can solve the problems of high positioning accuracy requirements and can not meet the autonomous navigation system of mobile robots, and achieve the effect of avoiding low accuracy and avoiding positioning position jumps.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0027] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. The following description is only for demonstration and explanation, and does not limit the present invention in any form.
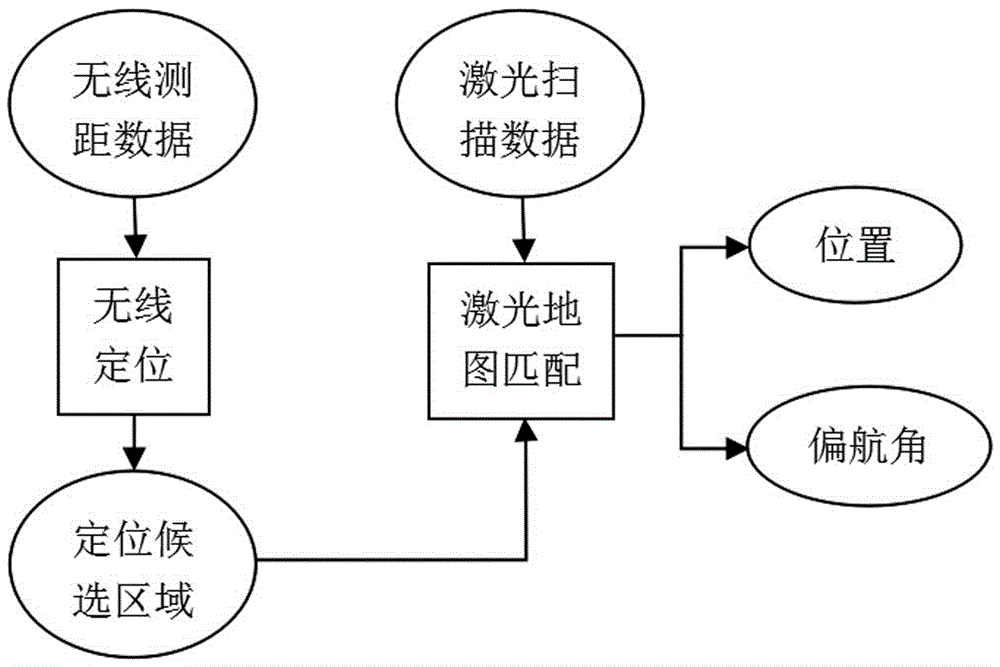
[0028] The pose calculation method based on wireless positioning and laser map matching includes the following steps:
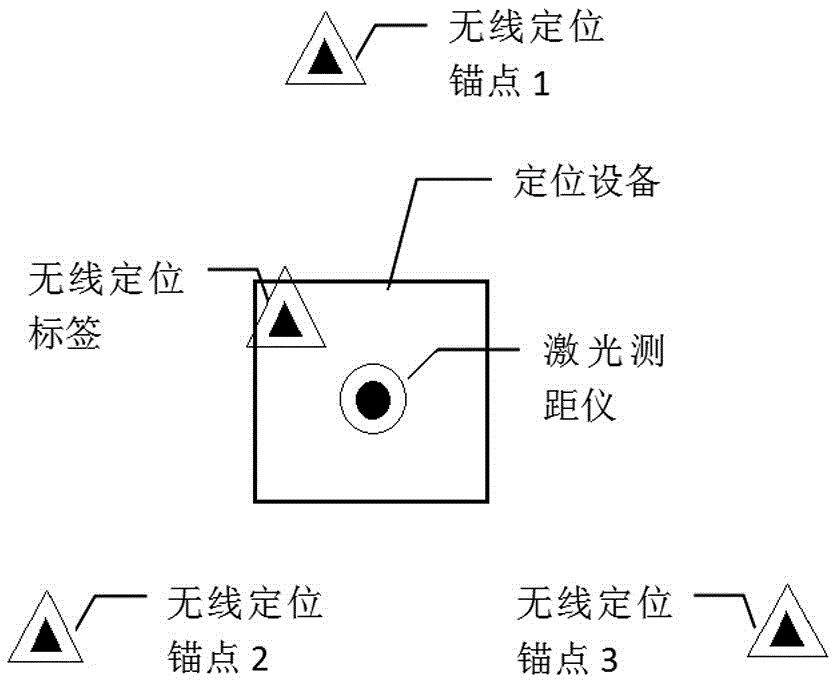
[0029] Step 1: Deploy at least three wireless positioning anchors in different positions in the environment, ensuring that all wireless positioning anchors do not form a straight line in space;
[0030] Step 2: Use the positioning device installed with the laser scanner and the wireless positioning tag, based on the simultaneous positioning and map construction algorithm (Simultaneous Localization and Mapping, SLAM), construct a global laser map, and record the current position of the positioning device and the positioning device and each wireless positioning anchor at the same time distance between poin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More