

Vertical profile single-rail traction robot
A single-track, robot technology, applied in the direction of manipulators, manufacturing tools, etc., can solve problems such as the inability to guarantee the straightness and straightness of profile traction, and achieve the effect of easy control, strong flexibility, flexible movement and walking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
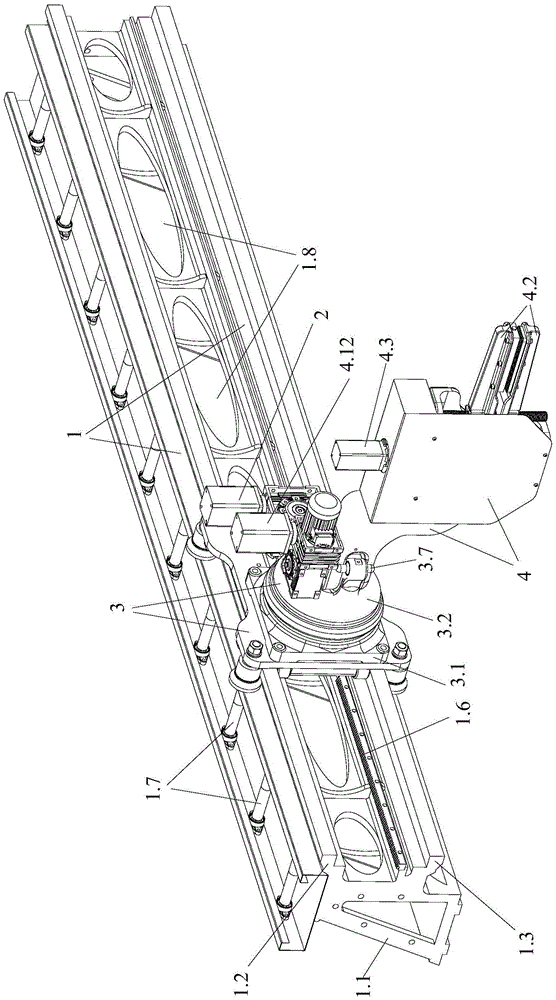
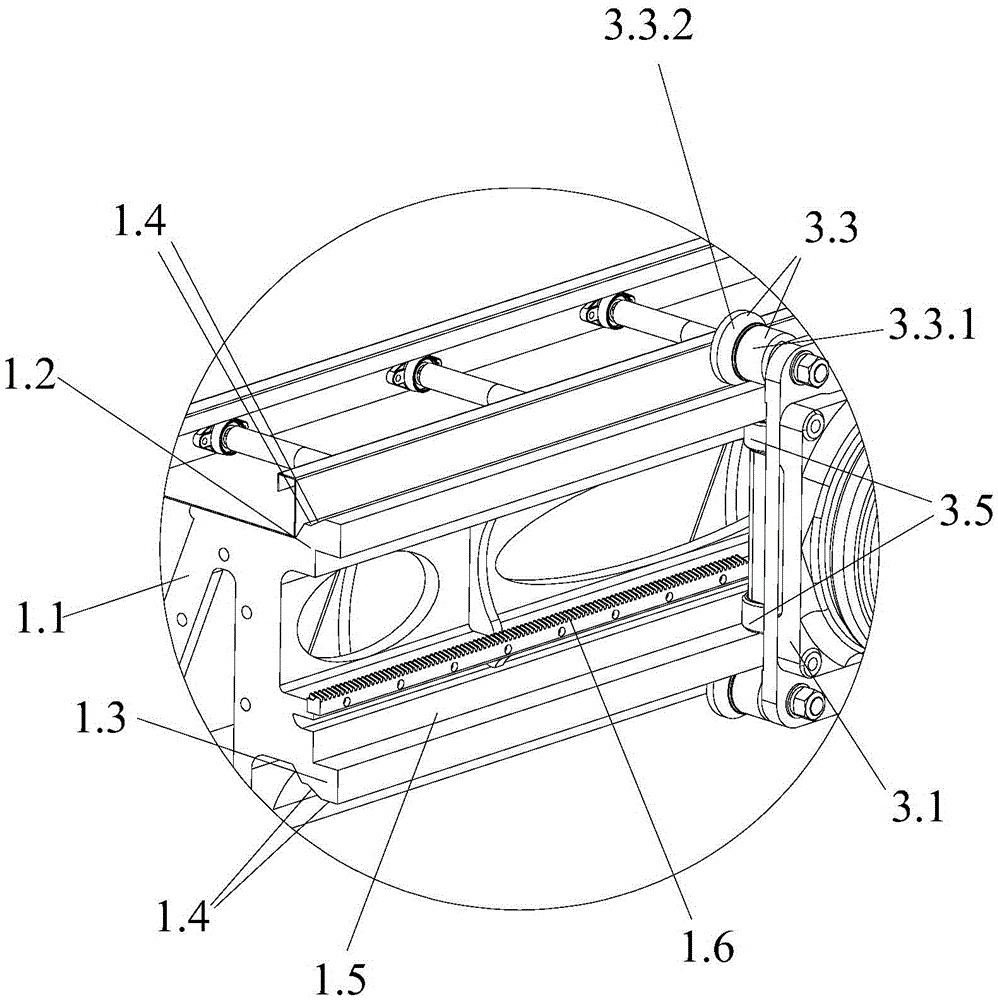
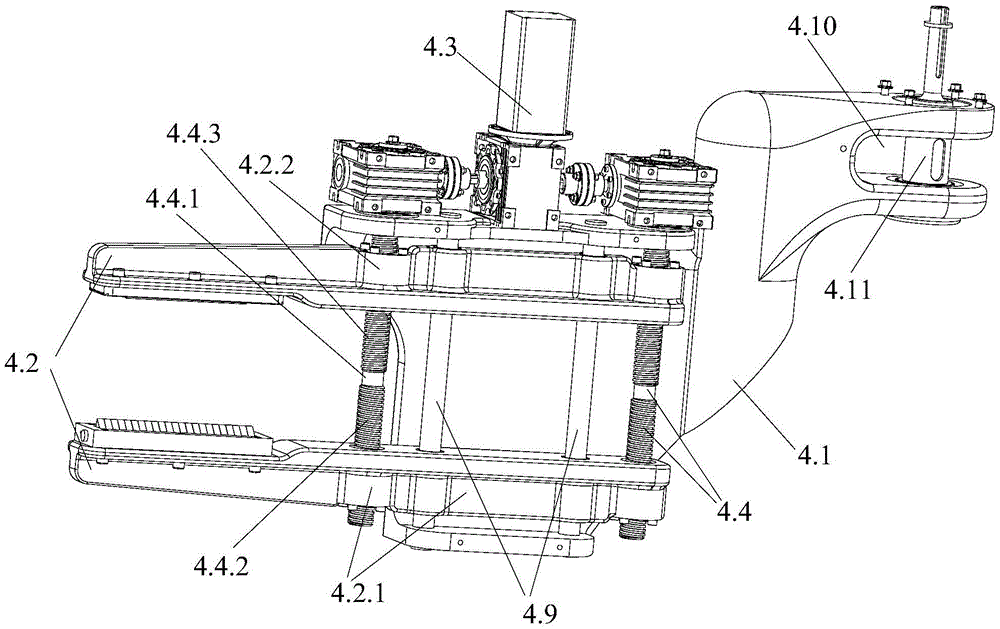
[0049] Such as Figures 1 to 7 As shown, the vertical profile single-track pulling robot of the present invention is used to pull the profile at the discharge port. The traction robot includes a vertical walking track 1, a mechanical arm for clamping traction profiles, a transmission mechanism, a drive mechanism 2 for connecting with the transmission mechanism and a control mechanism (not shown), wherein the mechanical arm is buckled on the vertical on the side of the vertical walking track 1, and is slidingly connected with the side of the vertical walking track 1, so that the mechanical arm is suspended on the side of the vertical walking track 1 for walking and moving; the transmission mechanism is a transmission device-3.8 respectively arranged on the mechanical arm And the transmission device two 1.6 on the vertical walking track 1, the control mechanism is connected with the drive mechanism 2 and the mechanical arm signal respectively, and the transmission device one 3.8...
Embodiment 2
[0062] The difference between this embodiment and the first embodiment is only that the positions of the threaded part 1 with a left-handed thread and the threaded part 2 with a right-handed thread are exchanged. In the present invention, the opening and closing movement of the first splint and the second splint can be realized as long as the screw rotation directions of the first screw and the second screw are opposite.
[0063] Other structures of this embodiment are consistent with Embodiment 1.
Embodiment 3
[0065] The only difference between this embodiment and Embodiment 1 is that the guide wheels of the present invention can be provided with six or eight etc. according to the size of the frame body 1, and the guide wheels are distributed symmetrically at the bottom of the frame body 1 up and down, and the relative guide wheels up and down The wheels are used to buckle on the side of the vertical walking track and be slidably connected with the vertical walking track. In this embodiment, the upper and lower relative guide wheels can be buckled on the side of the vertical track to realize the stable suspension and moving of the frame body one.
[0066] Similarly, one, two, three or more support wheels can be set according to the requirements, so as to avoid the phenomenon of deviation in the movement of the frame body, and further ensure the straightness and straightness of the movement of the mechanical arm.
[0067] Other structures of this embodiment are consistent with Embodi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More