

Multifunctional robot joint performance test system
A technology of robot joints and testing systems, applied in instruments, measuring devices, etc., can solve the problems of low robot precision and low testing efficiency, and achieve high self-adaptive effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
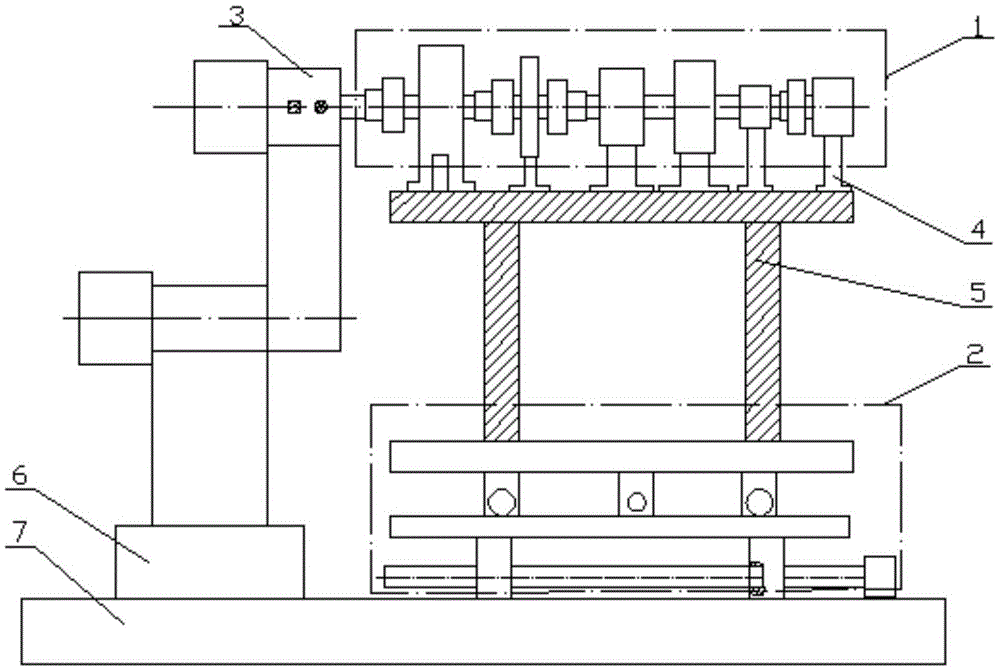
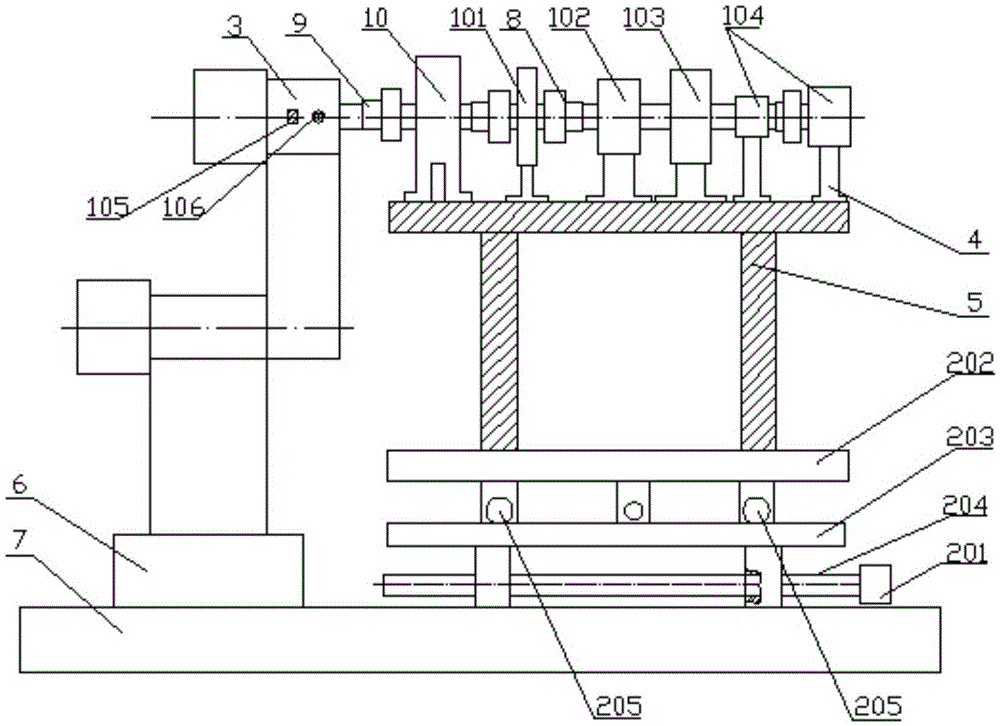
[0038] like Figure 1-2 As shown, a multifunctional robot joint performance testing system includes a test platform 1 for testing the performance of the robot joint and a linkage rail assembly 2 for driving the test platform 1 to move; The photoelectric encoding device 101, the torque sensing acquisition device 102, the load simulation control device 103 and the torque generation control device 104 connected in series with the device 8 in turn, the test platform 1 also includes a temperature test device and a vibration meter control device, the temperature test The probes of the control device and the vibration meter control device are respectively attached to the outer surface of the joint 3 of the robot to be test...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More