

Wheel-leg composite spherical surface parallel mechanism
A parallel and motor-driven technology, applied in the field of robotics, can solve problems such as the difficulty of sealing joint drive motors, large self-weight and load ratios, and complex leg mechanisms, etc., to achieve a compact wheel-leg composite structure, fast response speed, and save joints. driving effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
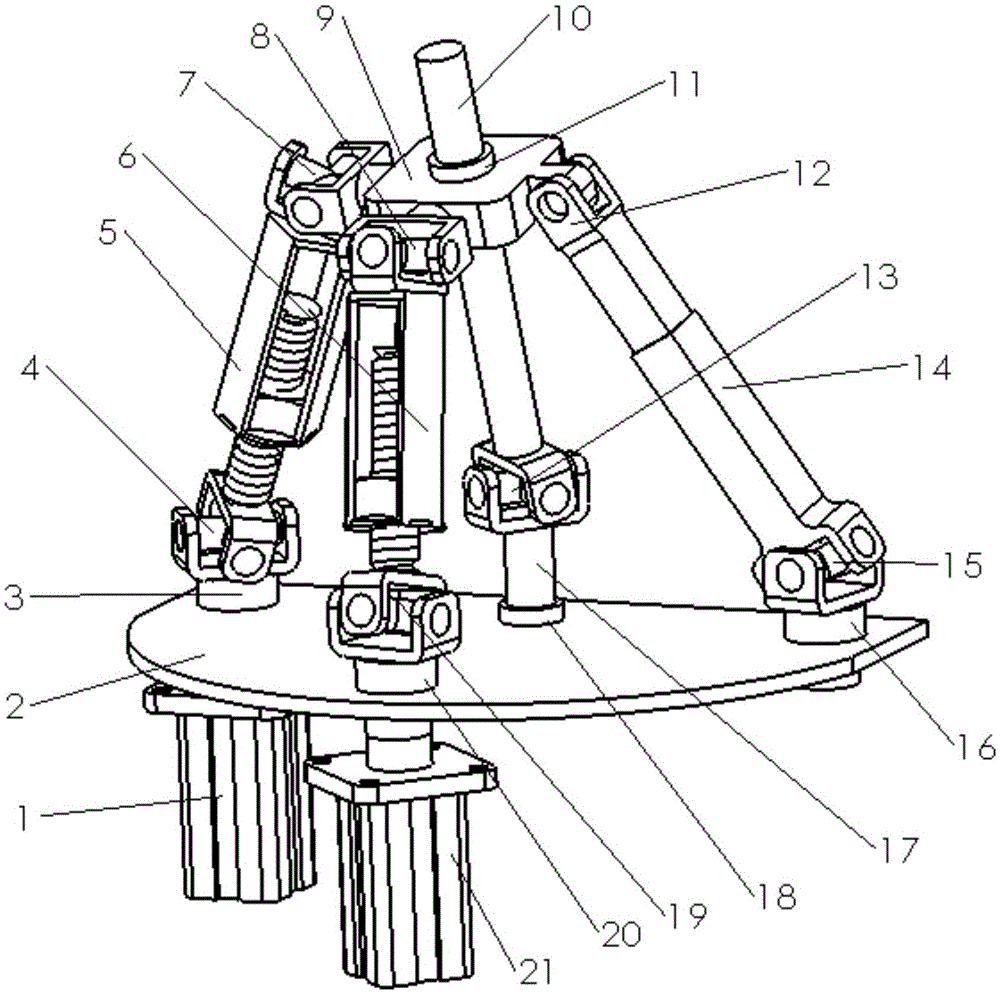
[0019] On the one hand, the present invention provides a wheel-leg compound spherical parallel mechanism, such as figure 1 As shown, including static platform 2 and dynamic platform 9, wherein:
[0020] The static platform 2 is a semicircle, and the dynamic platform 9 is a square shape;
[0021] Between one end of the static platform 2 and one end of the dynamic platform 9, the first rotating pair 3, the first universal joint 4, the first screw pair 5 and the second universal joint 7 are arranged in sequence, thereby forming the first RUHU kinematic branch chain , wherein the first revolving pair 3 is driven by the first motor 1 arranged on the static platform 2;
[0022] Between the upper end of the static platform 2 and the upper end of the dynamic p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More