Parallel robot provided with swing arm-connecting rod driving mechanisms
A link-driven, robotic technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of mechanical collision risk, large rotational inertia, large driving torque, etc., and achieves improved use safety, stable and reliable operation, structural simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
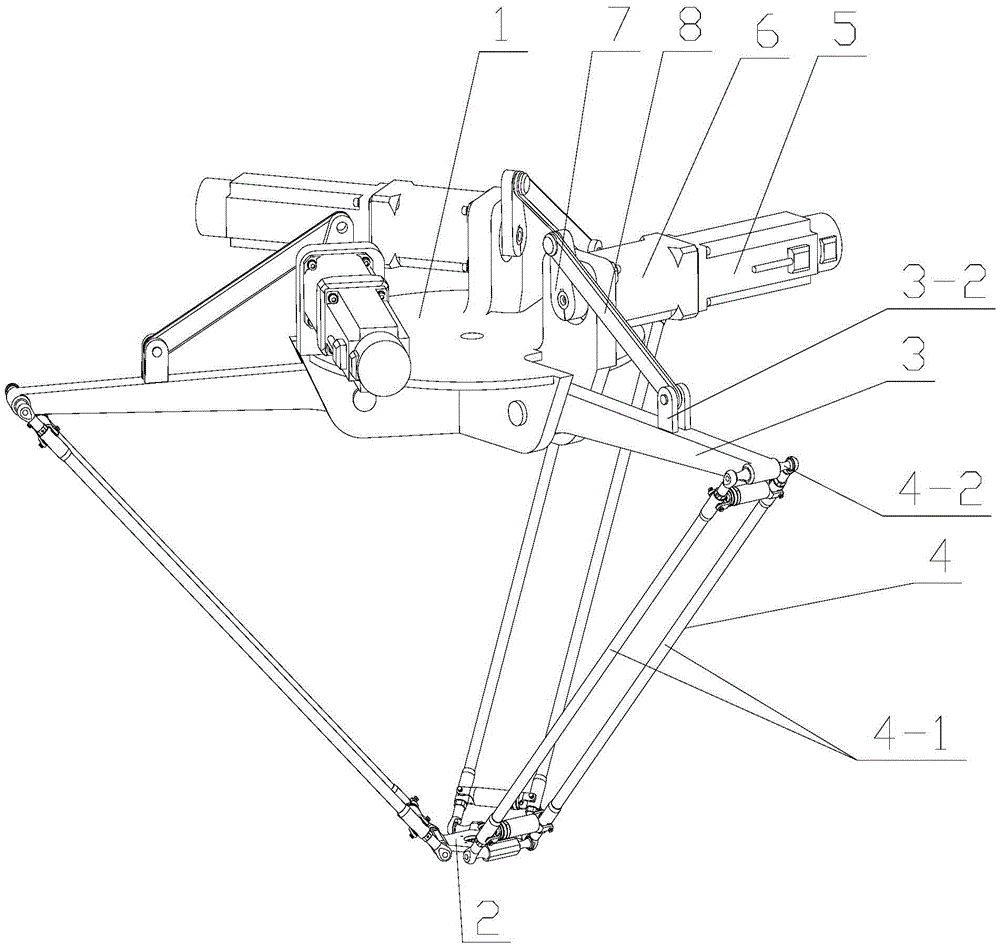
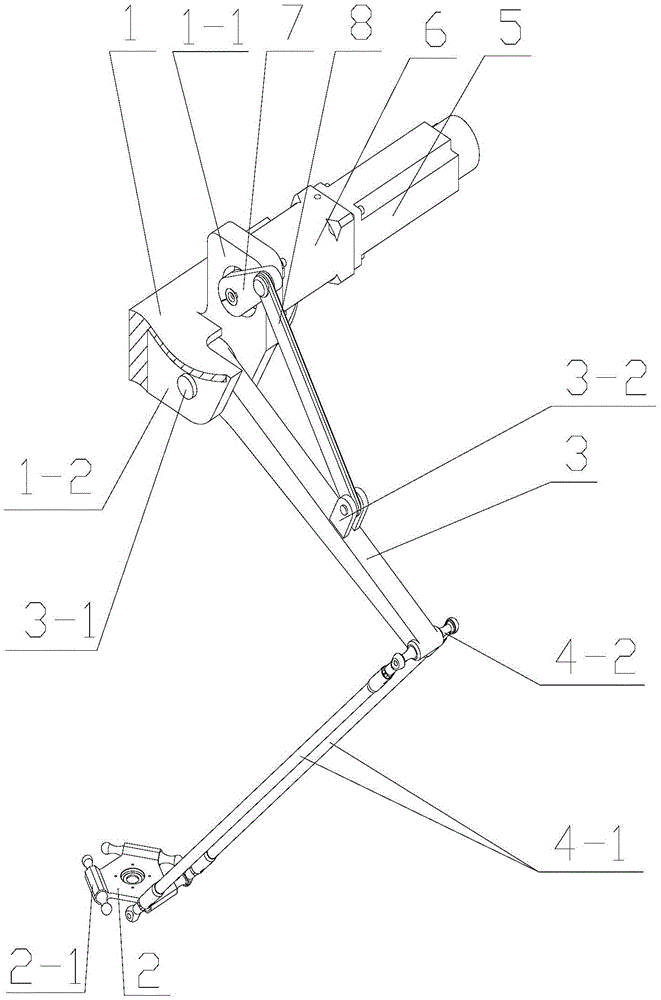
[0020] In this embodiment, a parallel robot with a swing arm-link drive mechanism, such as figure 1 As shown, it includes a fixed frame 1, a moving platform 2, a main arm 3, a parallel branch chain 4 and three sets of swing arm-link driving mechanisms. There are three main arms distributed around the circumference of the fixed frame, and the end of each main arm passes through The parallel branch chains are connected with the moving platform, and each main arm is provided with a set of swing arm-link driving mechanism. Each set of swing arm-link driving mechanism independently drives a main arm and parallel branch chains to move the moving platform, and finally realizes the three-axis spatial displacement of the moving platform X, Y, and Z. Among them, due to the swing arm-link The connection point between the driving mechanism and the main arm is located at the far end of the hinge of the main arm, which can reduce its moment of inertia, make the parallel robot have higher tr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com