

Self-adaptive robot hand device with elastic deflection rod clusters wound by flexible pieces
A technology of a robot hand and a flexible part is applied in the structural design of an adaptive robot hand device, and the flexible part is wound around an elastic displacement rod. problem, to achieve the effect of simple structure and low energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The specific structure, working principle and working process of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
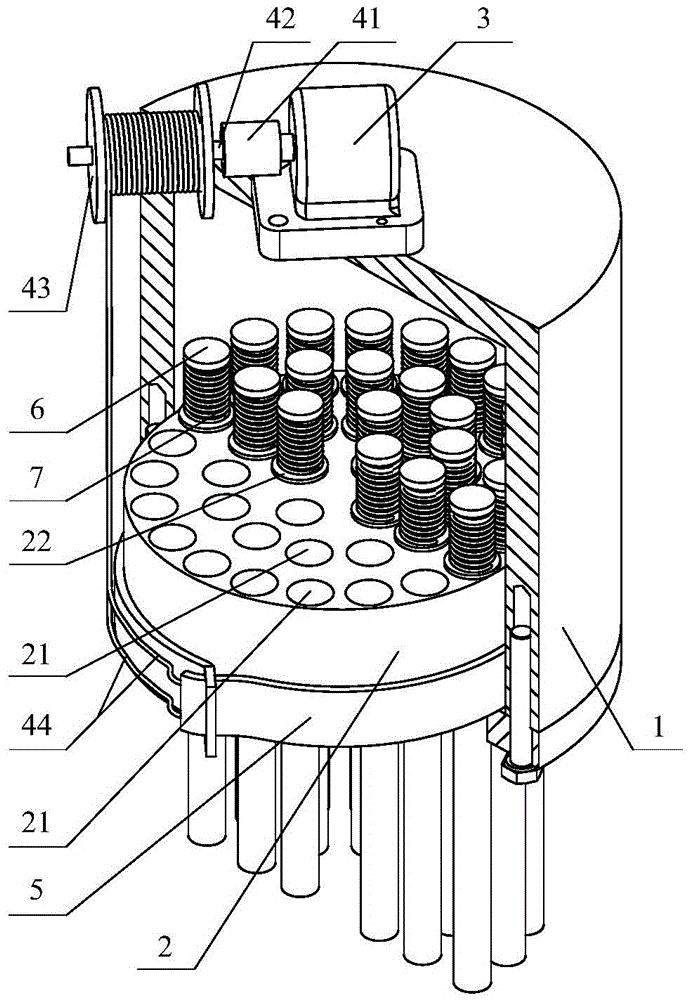
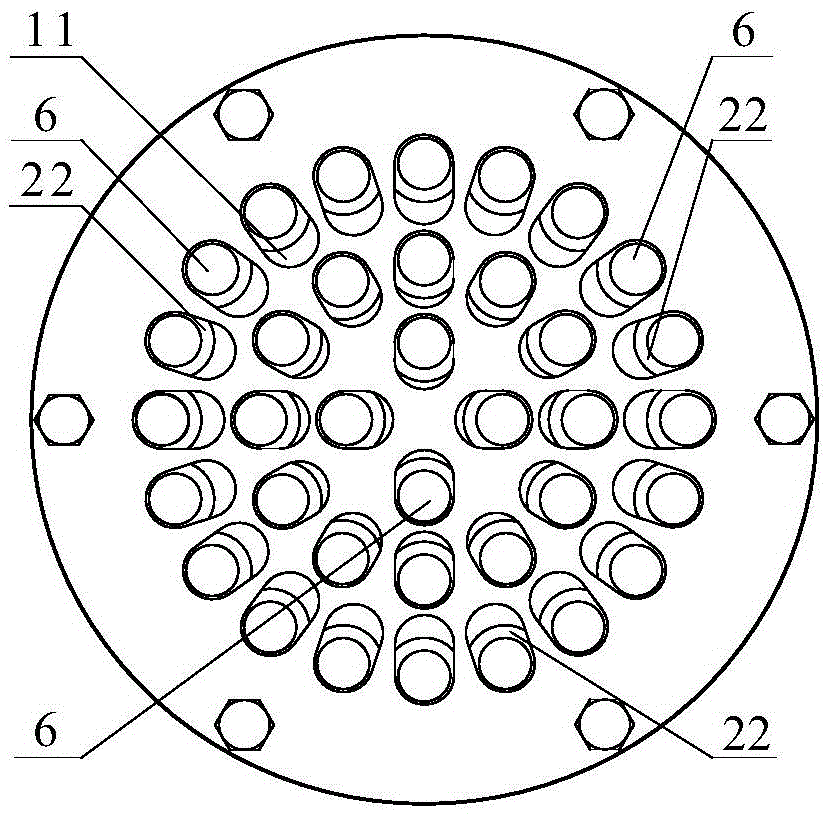
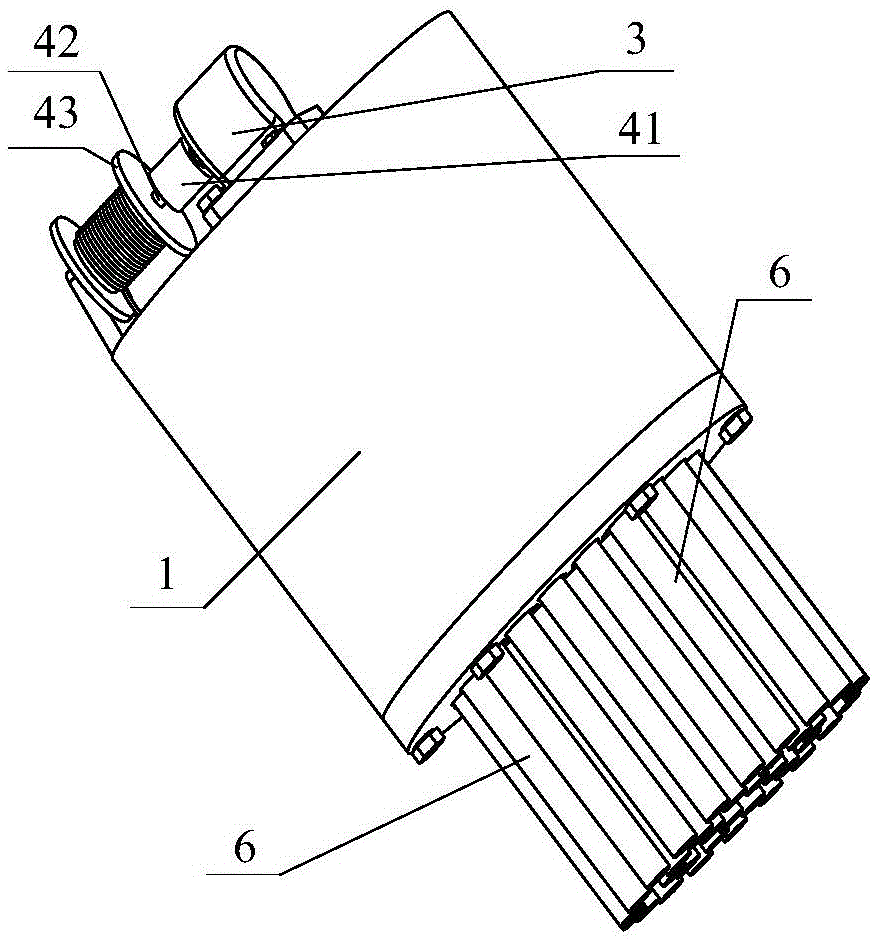
[0041]A kind of adaptive robotic hand device with flexible parts winding elastic displacement rod clusters according to the present invention is characterized in that it includes a base, a porous elastic block, a driver, a transmission mechanism, at least one flexible part, K sliding push rods and K a spring; the porous elastic block is installed in the base, the porous elastic block is elastic, there are K through holes on the porous elastic block, and the angle between the centerlines of any two through holes is less than 15 degrees; The output shaft of the driver is connected to the input end of the transmission mechanism, and the output end of the transmission mechanism is connected to the flexible member; the i-th sliding push rod is slidably embedded in the i-th through ho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More