

All-terrain exploration robot
A robot, all-terrain technology, applied in the field of exploration robots, can solve problems such as loss of power, easy damage, complex structure, etc., to achieve the effect of ensuring smooth rolling, simple structure, and hard to damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
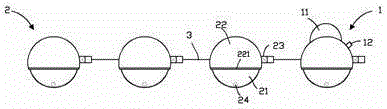
[0014] exist figure 1 In the first shown embodiment, the all-terrain exploration robot includes a front 1, and various body parts 2 towed behind the front; the body parts 2 include a hollow sphere 21, and an open sphere wrapping the hollow sphere 21 Shell 22, the open spherical shell 22 and the hollow spherical body 21 form a ball connection pair, so that the hollow spherical body 21 can roll freely in the open spherical shell 22; the hollow spherical body 21 contains a ball 24 made of soft iron; The front of the opening spherical shell 22 is fixed with an electromagnet 23 extending forward; A counterweight ring 221 is arranged on the edge so that the center of gravity is lower than the center of the ball. Each of the body parts 2 is sequentially connected by a connecting line 3, one end of the connecting line 3 is connected to the rear of the opening spherical shell 11 of the previous body part, and the other end is connected to the opening spherical shell of the latter body...
Embodiment 2
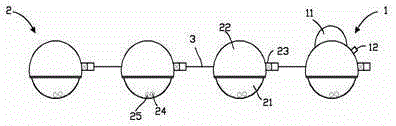
[0019] exist figure 2 In the shown embodiment two, the difference from the first embodiment is that each hollow sphere 21 also includes a mercury bead 25; the quality of the mercury bead 25 is more than twice that of the ball; In this scheme, when the ball 24 rolls down from close to the electromagnet 23, it is blocked by the mercury ball 25 that is always at the bottom of the hollow sphere 21, so that the ball 24 cannot continue to roll backwards, thereby preventing the ball 24 from rushing toward the electromagnet 23. The rear of the inner wall of the hollow sphere 21 affects the rolling of the hollow sphere 21 forward.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More