

Control system of potted seedling transplanting robot
A control system and robot technology, applied in transplanting machinery, electrical program control, program control in sequence/logic controller, etc., can solve the problems of large size, high price, poor adaptability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
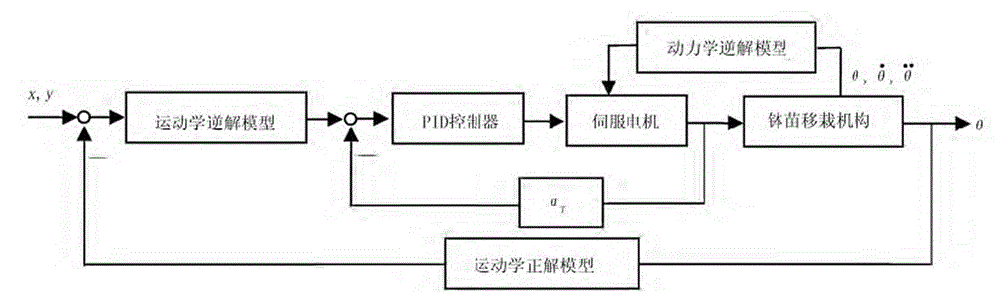
[0009] As shown in the figure, the present invention includes a kinematics inverse solution model, a PID controller, a servo motor, a dynamics inverse solution model, a pot seedling transplanting mechanism, and a kinematics positive solution model. It is characterized in that the signal is first input into the kinematics inverse solution model The signal input port of the kinematics inverse solution model is inversely transformed and modeled, and then the signal is transmitted to the signal input port of the PID controller. The output port of the PID controller is connected to the control end of the servo motor, and the output end of the servo motor Connect the pot seedling transplanting mechanism; the pot seedling transplanting mechanism is connected to the servo motor through the motion inverse solution model, and one end of the pot seedling transplanting mechanism is connected to the signal input terminal through the kinematics positive solution model.
[0010] As a preferre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More