

Biped robot walking plan and control method
A bipedal robot and control method technology, which is applied in the fields of instruments, special data processing applications, electrical digital data processing, etc. Adjusted, robust effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0025] Step S1: Set the target horizontal movement speed and body height for the robot on the host computer.
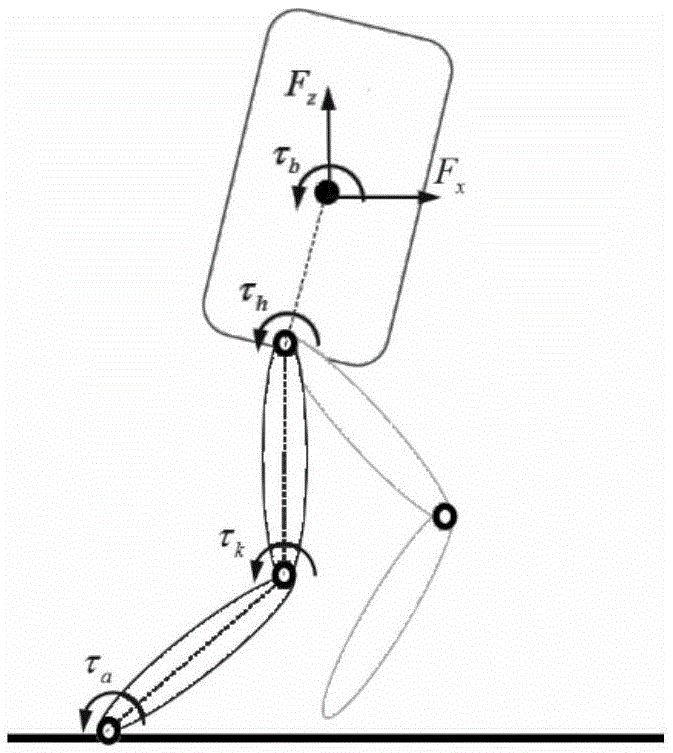
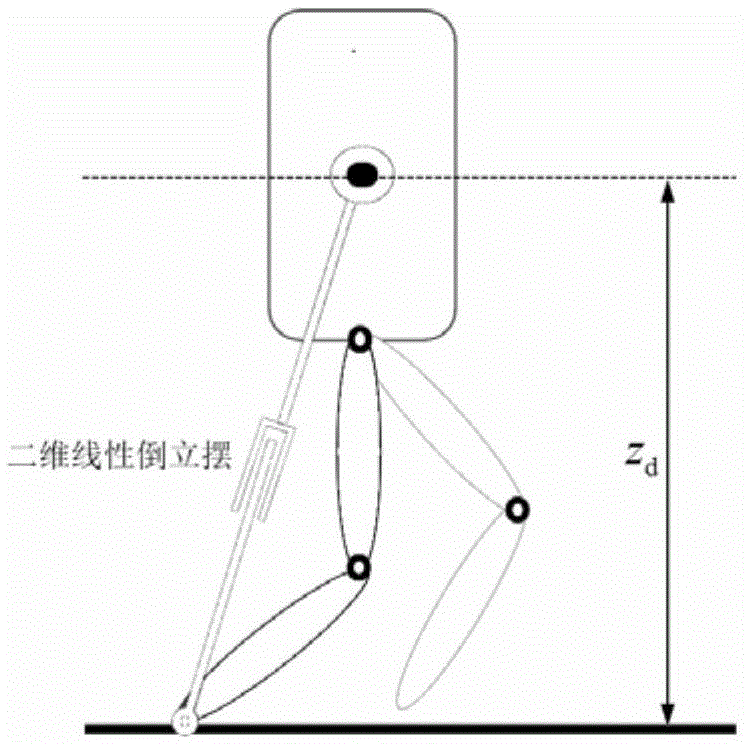
[0026] Step S2: Referring to the fact that the body height and posture are almost constant during human walking, the biped robot without feet is equivalent to a linear inverted pendulum system (LinearInvertedPendulumModel, referred to as: LIPM) through virtual force control, such as Figure 1b shown. One of the important characteristics of LIPM is that the center of mass of the body is always kept at a constant height z d , Body posture is always maintained in an upright posture. Therefore, the closed-loop control rate is designed for the height of the body center of mass through the vertical virtual force to control the center of mass at a constant height, and the closed-loop control rate is designed for the body posture through ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More