

Tendon rope lateral locking linkage adaptive robot finger device
A robot finger, self-adaptive technology, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problem that the device is difficult to provide a wider range of grasping force, the fingers quickly collide with the object, and the locking effect is affected, so as to achieve the grasping process. Fast and stable effects, easy control, low assembly and maintenance costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
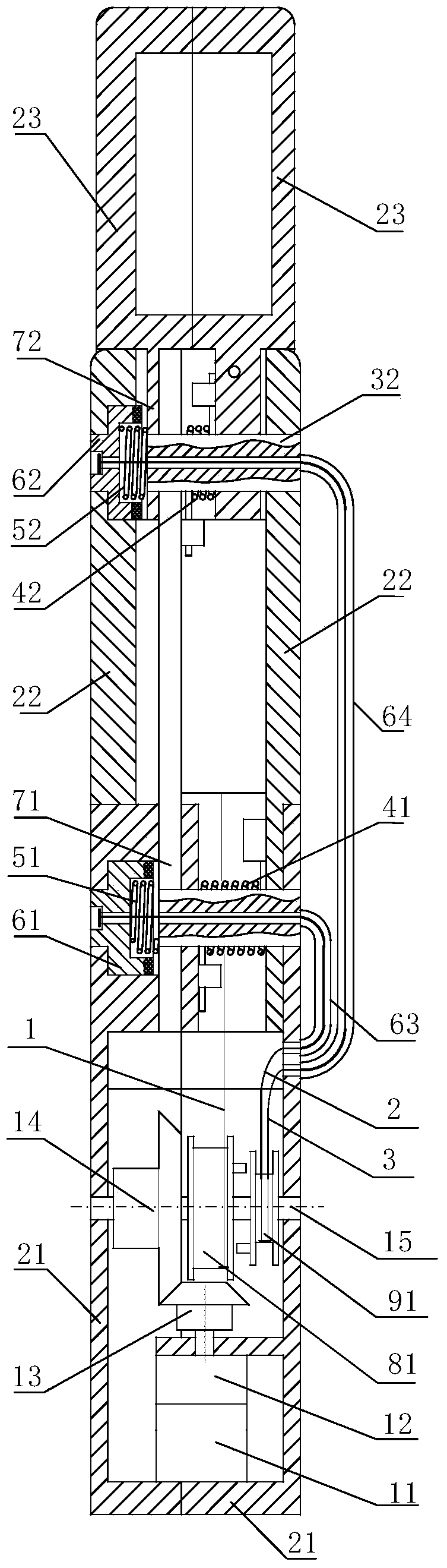
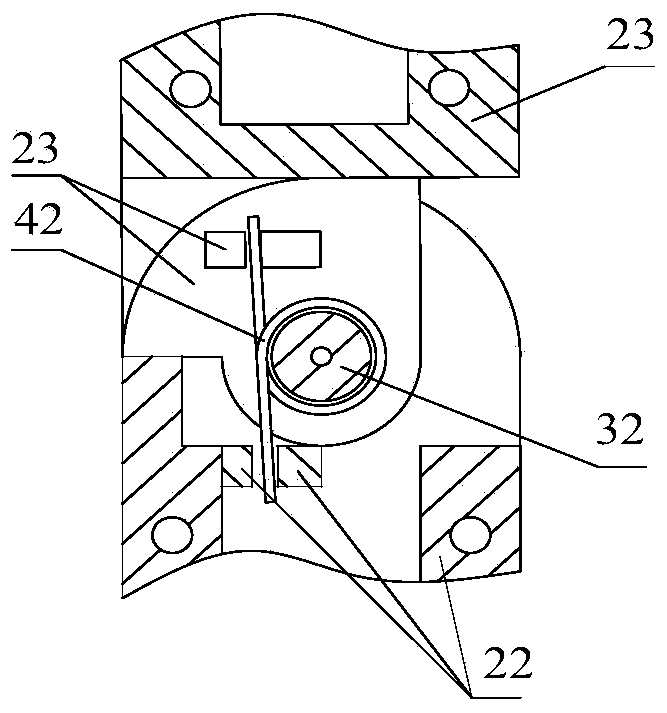
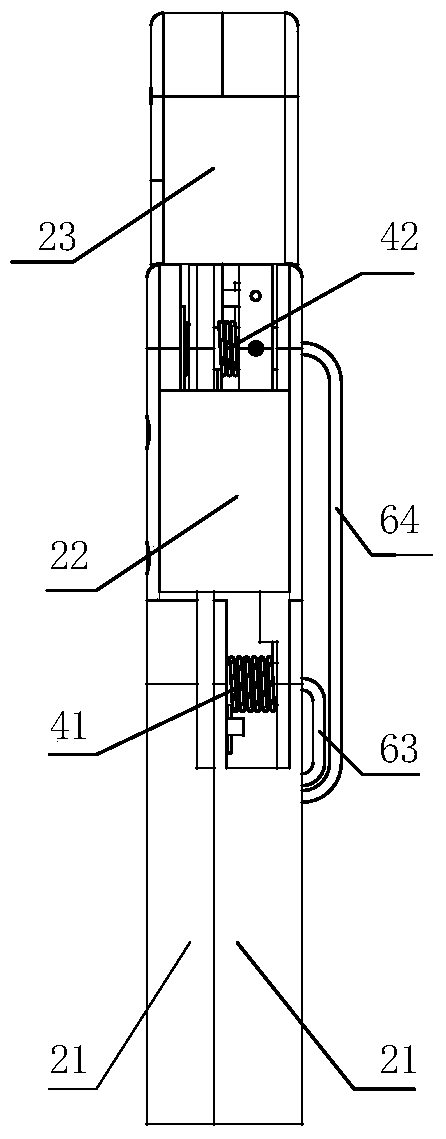
[0047] The specific structure, working principle and working process of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0048] The tendon-rope type lateral locking linkage adaptive robot finger device provided by the present invention includes a motor, a reducer, a transmission mechanism, a main tendon rope, N finger segments, N-1 joint shafts, N-1 joint springs, N-1 articulated wheels and the first cord member; the motor is fixedly connected to the first finger segment, the output shaft of the motor is connected to the input shaft of the reducer, and the output shaft of the reducer is connected to the transmission mechanism The input end is connected, and the output end of the transmission mechanism is connected with the first pull cord; the first pull cord is slid or rotated and arranged in the first finger segment; one end of the main tendon rope is connected with the first pull cord The other ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More