Trajectory tracking control method for NSV (Near Space Vehicle)
A near-space vehicle and trajectory tracking technology, applied in the direction of adaptive control, general control system, non-electric variable control, etc., can solve the problems of large error, poor stability, lack of NSV system research, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
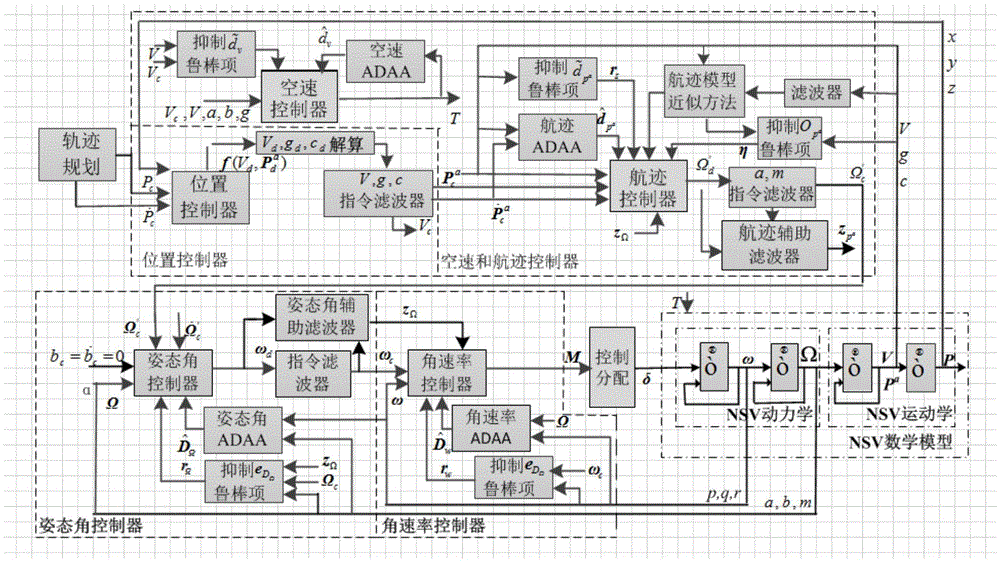
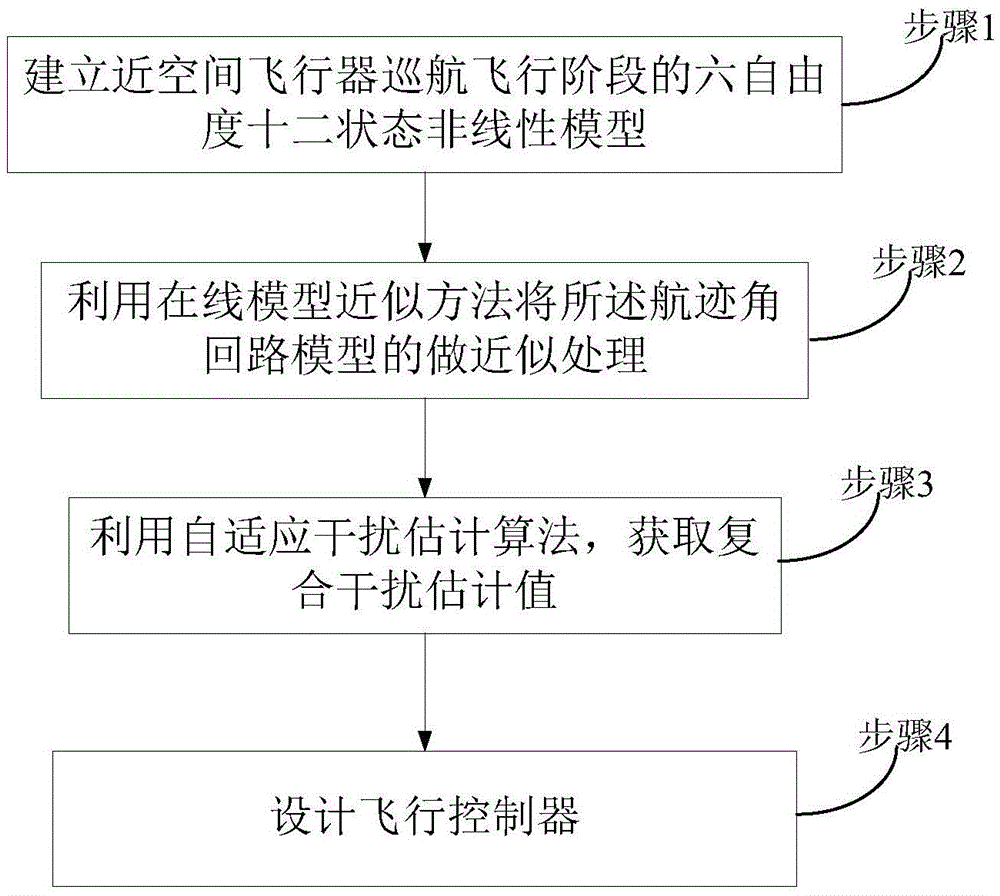
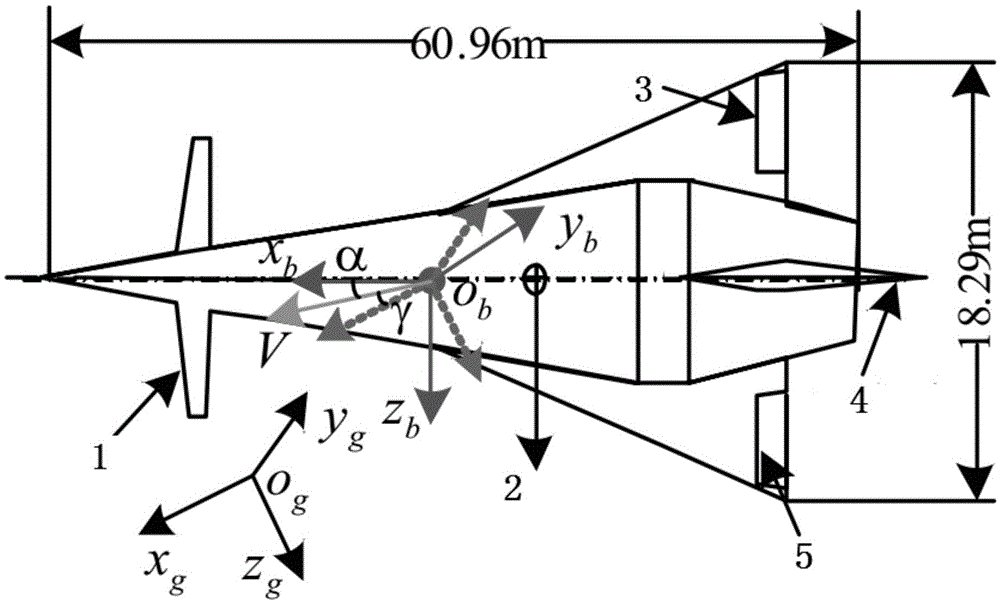
[0041] The present invention designs a robust adaptive trajectory tracking control strategy for a near-space vehicle NSV (NearSpace Vehicle) six-degree-of-freedom twelve-state model in the cruising flight stage. Firstly, a new dynamic model approximation method is proposed for the design of track controller. Second, a controller-independent disturbance estimator is designed using adaptive techniques. Then, using the combination of dynamic inverse and backstepping methods, the design methods of position, attitude angle and angular rate controllers are given respectively. Among them, the instruction filter is applied to avoid the differential expansion problem in the backstepping design, and the tracking error caused by the incomplete execution of the project instruction is corrected by the compensation item, and the robust item is constructed to suppress the influence of the interference estimation error on the trajectory tracking. The above-mentioned method of the present inv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More